2019年4月号
GNSSとネットワークの連携による高付加価値位置情報サービス
- GNSS
- GPS
- 測位
NTTネットワーク基盤技術研究所ではデジタルトランスフォーメーション(DX)を加速するSmart Worldの実現へ向け、GPSをはじめとするGNSS(Global Navigation Satellite Systems)を使用した測位において、高層の建造物が林立するアーバン・キャニオン環境での測位精度向上技術を開発するとともに、測位演算処理の一部をクラウド・エッジ上で行うことで測位性能の抜本的な向上と新たな付加価値を実現する技術開発に取り組んでいます。
吉田 誠史(よしだ せいじ)/ 桐原 誉人(きりはら たかひと)/ 坪井 俊一(つぼい しゅんいち)/ 豊野 剛(とよの つよし)/ 桑原 健(くわはら たけし)
NTTネットワーク基盤技術研究所
背 景
GPSは1990年代からカーナビをはじめとする民生用途に使用され、今日GNSS(Global Navigation Satellite Systems:全地球航法衛星システム)による測位はスマートフォンを含む幅広いアプリケーションに活用されています。国内では2018年11月から「日本版GPS」である準天頂衛星システムの本格運用が開始され、補強信号を使用した高精度(精密)測位が大きな関心を集めています。
NTTネットワーク基盤技術研究所ではデジタルトランスフォーメーション(DX)を加速するスマートな社会(Smart World)の実現へ向け、GNSSとネットワーク・クラウドのシナジーにより位置計測の分野において新たな付加価値を創造することをめざした研究開発を行っています。
航法衛星信号により理想的には地球上のどこでも高精度な測位を実現することができますが、実際の測位精度は衛星信号の受信環境に大きく影響されます。この課題はこれまで主にGNSSレシーバの性能向上により解決が試みられてきましたが、あらゆるデバイスがネットワークにつながるIoT(Internet of Things)の実現を前提とし、クラウド・エッジにGNSS測位演算処理の一部を担わせることによって抜本的な課題解決を図るとともに、位置情報に新たな付加価値を与えることが本取り組みの目的です。
GNSS測位の機能配備多様化とクラウドGNSS測位アーキテクチャ
GNSS測位は図1に示すように多様なアプリケーションで使用されます。自動走行車等の高速移動体では高頻度な測位が求められる一方、測量では静止状態で高い測位精度が求められます。スマートフォンやカーナビでは数メートルの測位精度が得られるコード測位(Code-based positioning)*1方式が使用され、測量ではセンチメートル級の測位精度を実現する搬送波位相測位(Carrier-phase based positioning)*2 方式が使用されています。搬送波位相測位では波数アンビギュイティ(Wavenumber ambiguity)*3の解決のために高度な演算処理が必要になります。これまではコード測位方式に対応した汎用的なGNSSレシーバ製品と搬送波位相測位方式に対応した特殊用途向けのハイエンドなGNSSレシーバ製品はアプリケーションに応じて使い分けられていました。現状では搬送波位相測位方式に対応したレシーバ製品は高コストであり、適用領域拡大の阻害要因になっています。さらに、アプリケーションには測位精度や頻度だけでなくコストや省電力性能といったさまざまな要件があり、レシーバチップ(ハードウェア)でこうした多様な要件をカバーするのは難しくなっています。
クラウドGNSS測位アーキテクチャでは測位演算の機能配備の一部をクラウド側に移すことによって測位点では低コストの汎用的なGNSSレシーバを使用し、測位方式の違いやアプリケーションによる測位性能の要件の違いは基本的にクラウド側の処理で吸収します。つまり単一のレシーバで「マルチグレード」な測位を実現することをめざす新しいGNSS測位のアーキテクチャです(図1)。最終的な測位演算処理は測位点のGNSSレシーバの内部ではなく、レシーバから転送された観測データ(Observation data)*4を使用してクラウド側で行い、測位演算結果(座標値)が測位点に返送されます。
本アーキテクチャではクラウド・エッジ上のCPU・GPUを基盤とした潤沢なコンピューティング・リソースを活用し、衛星選択処理を含む高度な測位演算処理を行います。搬送波位相測位では初期測位演算時間を大幅に短縮するだけでなく、NTTビルのローカル基準局を含むさまざまな補強信号をシームレスに選択することができるメリットがあります。また、2次元地図や3次元の建物データ等の地理空間情報やAI(人工知能)や機械学習などの手法をGNSS測位へ適用するといった、これまでにないアプローチも考えられます。さらにはクラウド上での位置情報を活用した多様なアプリケーションとの高度な連携も考えられます。
観測データの出力に対応した汎用的なGNSSレシーバ製品は最近増加しており、一部の製品は複数の周波数帯(マルチバンド)に対応しています。また、スマートフォンではAndroid OS バージョン7から一部の端末において内蔵のGNSSレシーバの観測データをAPI(Application Programming Interface)で取得できるようになり、今後、対応端末が拡大することが期待されます。
GNSSとネットワークのシナジーとしてはA-GNSS(Assisted GNSS)*5が携帯電話やスマートフォンなどに導入されていますが、本アーキテクチャはさらに高度な両者のシナジーと位置付けることができます。従来、GNSSレシーバチップセットの内部で行われていたGNSS測位演算処理が今後はクラウド・エッジ以外にもスマートフォンのアプリケーションや車載プロセッサ等で実行され、測位演算の機能配備の形態が多様化することが想定されます。私たちは今後の動向を見据え、適用領域に応じた最適な機能配備を柔軟に実現することをめざしています。
*1コード測位:航法衛星信号の受信位置への到達時間の計測において衛星に固有のコード信号を使用する通常のGNSS測位の方式です。
*2搬送波位相測位:航法衛星信号のコード信号に加え、搬送波の位相情報を観測することによる精密測位方式です。条件の良い場合には1cm以下の精度での精密測位が可能です。
*3波数アンビギュイティ:受信点までの航法衛星信号の搬送波の波数が未知であることです。
*4観測データ:GNSSレシーバの測位演算における疑似距離および搬送波位相計測の結果の情報です。Raw data(生データ)とも呼ばれます。
*5A-GNSS:モバイル網を経由して航法衛星の軌道情報を短時間に配信する方式です。
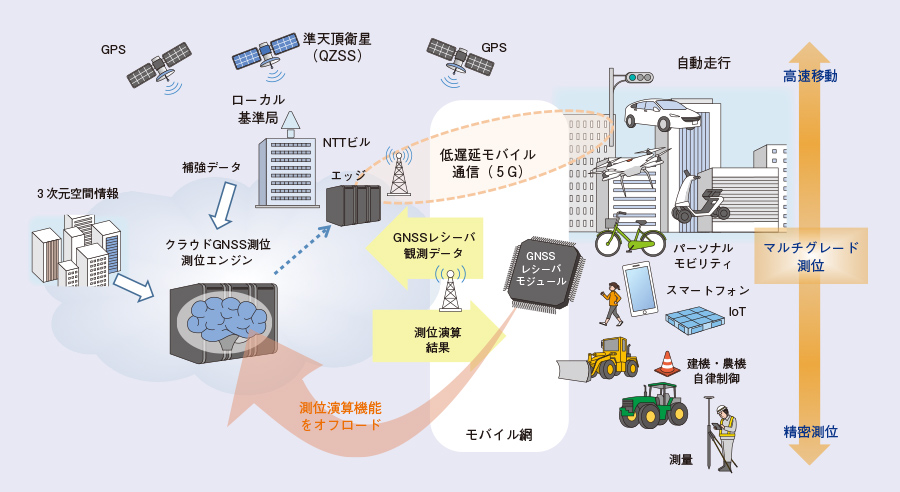
図1 クラウドGNSS測位アーキテクチャの概要
Smart Mobilityへの適用事例
クラウドGNSS測位アーキテクチャのSmart Mobilityへの適用事例として走行車両の位置計測のユースケースを紹介します。
高層の建造物が林立し、道路が碁盤目状に近接するアーバン・キャニオン受信環境では衛星信号を見通し状態で受信できる開空間が制限され、衛星信号が建物で反射・回折したマルチパス信号を受信することによって測位精度が大幅に劣化します。東京・丸の内の一般道においてカーナビ等で使用される汎用的なシングルバンドのGNSSレシーバによって収集した、GPSおよび準天頂衛星信号の観測データを使用して後処理によるコード測位演算を行った結果を図2に示します。従来では道路から大幅に外れていたポイントでも、私たちが独自に開発した、受信した衛星信号から測位に適した衛星信号を選択する「スマート・サテライト・セレクション」*6アルゴリズムを適用することによって測位精度が大幅に改善することを確認しました(1)。衛星選択に要した時間は今回使用した検証環境においては1つの測位点あたりわずかに5ミリ秒程度でした。
自動走行車の制御はレーザ、ライダ、オドメトリ、ジャイロ、加速度センサやダイナミックマップと車載カメラを使用した複合的な制御が見込まれますが、GNSS測位ではレーン判定が可能な精度が要求されます。上記のシングルバンドのGNSSレシーバによって首都高速都心環状線で収集したGPS衛星の観測データを使用し、後処理で搬送波位相測位(VRS-RTK)演算を行った結果においても私たちの衛星選択アルゴリズムの適用により収束(FIX)解が得られる割合(FIX率)が向上する効果が確認されました。FIX解では数10 cm以下の測位精度が得られていると想定されるため、レーン判定だけでなくレーン内の車両の位置を把握できる可能性があります。トンネルや橋梁などで一時的にGNSS衛星信号をロストした際の再FIXに要する初期測位演算時間も10秒以下であり、マルチバンドのGNSSレシーバを使用した場合にはさらに大幅に短縮できる見込みです。1秒間に10回程度の高頻度な測位を行う場合には図1に示すように測位エンジンをエッジに配置し、URLLC(Ultra-Reliable and Low Latency Communications)等の5G低遅延モバイル通信を適用することが考えられます。本アーキテクチャの適用は自動走行の普及に向けて課題となる車載設備のコスト低減にも貢献します。
*6スマート・サテライト・セレクション:NTTが独自に開発したGNSS衛星信号の選択アルゴリズム技術で遅延の大きい不可視衛星のマルチパス信号を選択的に排除します。
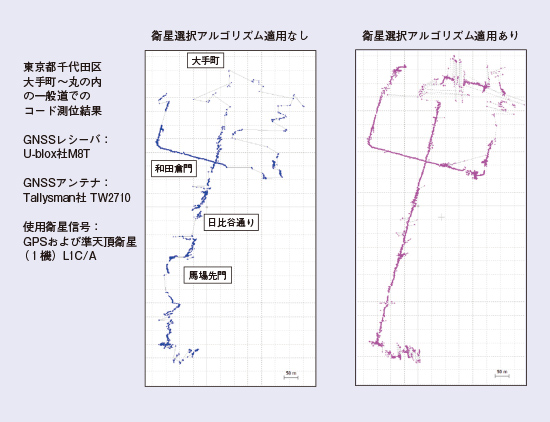
図2 衛星選択アルゴリズムの適用効果(コード測位)
今後の展開
Smart Mobilityの分野ではC-V2X(Celluler-Vehicle to X)等の通信手段を備えたコネクティッドカーが普及し、車車間(V2V: Vehicle to Vehicle)、路車間(V2I: Vehicle to Infrastructure)で低遅延、広帯域な通信が実現される可能性があります。人と車の位置を包括的に把握することで見通しの悪い交差点における歩行者・自転車位置の把握、配車サービスにおける乗客の位置把握、路線バス運行の効率化、バリアフリーマップの作成などの幅広い領域への適用が期待されます。さらにはイベント、災害時の輸送にも適用できる可能性があります。こうした位置情報サービスとの高度な連携も含めた、高精度測位技術の適用へ向けた検討を行っていきます。
■参考文献
(1) https://www.ntt.co.jp/news2018/1810/181023a.html
問い合わせ先
NTTネットワーク基盤技術研究所
コグニティブファウンデーションNWプロジェクト
TEL 0422-59-3013
FAX 0422-59-6364
E-mail nt-kensui-ml@hco.ntt.co.jp



GNSSによって実現されるセンチメートル級の測位には新しい産業領域を創出する大きな可能性があります。NTT研究所では技術の確立だけでなく適用領域の検討も合わせて推進していきます。