2021年3月号
Focus on the News
ロボット農機や5G、IOWN関連技術による農機の圃場間自動走行と遠隔監視制御を実現
北海道大学(北大)、岩見沢市、NTT、NTT東日本、NTTドコモは、最先端のロボット農業技術に、第5世代移動通信システム(5G)、革新的ネットワーク技術IOWN(Innovative Optical and Wireless Network)を実現する技術の1つである複数ネットワーク最適活用技術や高精度な測位技術等を用いて、農機完全自動走行に向け、通信や映像の途切れを防止する等、安定的で円滑な農機の広域自動走行とその遠隔監視制御を実現しました。
■背 景
日本の農業は長期にわたる就農人口の減少や高齢化等による人手不足が続いています。また、昨今の新型コロナウイルス感染拡大の影響により、外国人技能実習生が減少する等、農業現場の労働力減少に拍車がかかっています。このような状況において、日本の農業を維持、発展させるためには、農家当りの耕作面積拡大等につながる飛躍的な生産性向上が求められますが、農家自身の努力だけで実現するには限界があります。そのため、ロボット農機等を活用して、農作業を可能な限り自動化することにより、直面する人手不足を解消することが期待されています。
■取り組み概要
このような背景のもと、北大、岩見沢市、NTT、NTT東日本、NTTドコモは2019年6月28日に産官学連携協定を締結し、最先端の農業ロボット技術と情報通信技術の活用による世界トップレベルのスマート農業およびサスティナブルなスマートアグリシティの実現に向けた研究、技術開発等を進めてきました。
これまで、農機からの高精細映像や監視センタからの発進・停止等の制御信号の安定的な伝送をめざし、5G等の高速・大容量・低遅延のネットワークを活用して実証を進めてきました。しかし農機完全自動走行対応には圃場間での移動も含め、遠隔地からトラクタやコンバイン等の農機をモニタ等で監視、制御することが必要となります。
例えば、対象の農地が5Gのサービスエリア外であったり、その無線通信の特性上、遮蔽等の影響を受けて自動運転農機が必要な通信品質を得られなかった場合、遠隔地にある監視センタへ送信する監視映像が乱れたり、途切れたりすることにより遠隔監視の継続的・安定的な実施が難しい等の課題があり、その解決策として、複数のネットワークを安定的に切り替えるなどの対策が有効です。
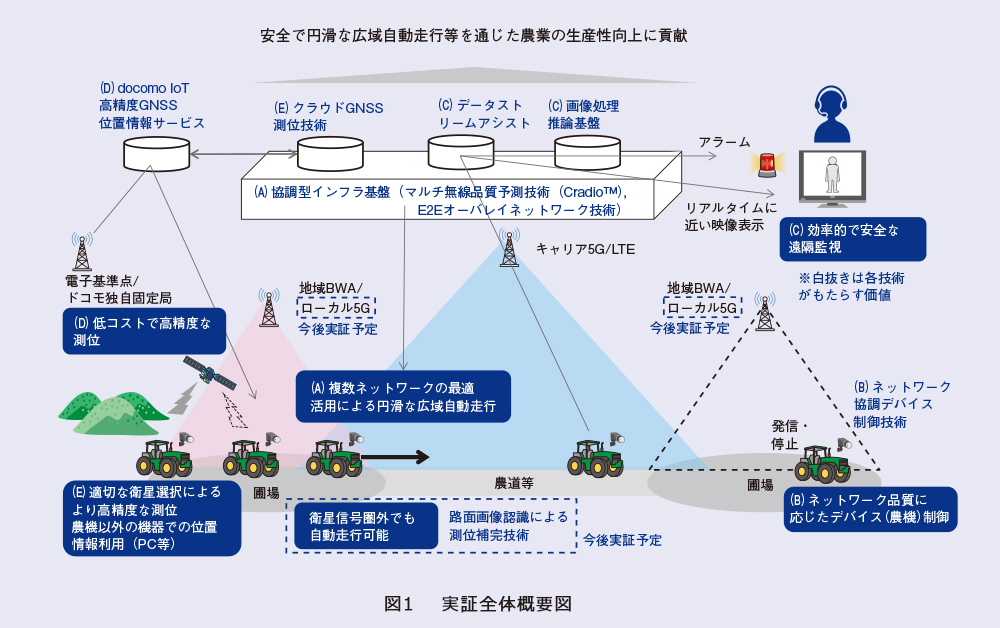
そこで、今回の実証では、以下5つの技術を実現し、その有効性を確認しました(図1)。
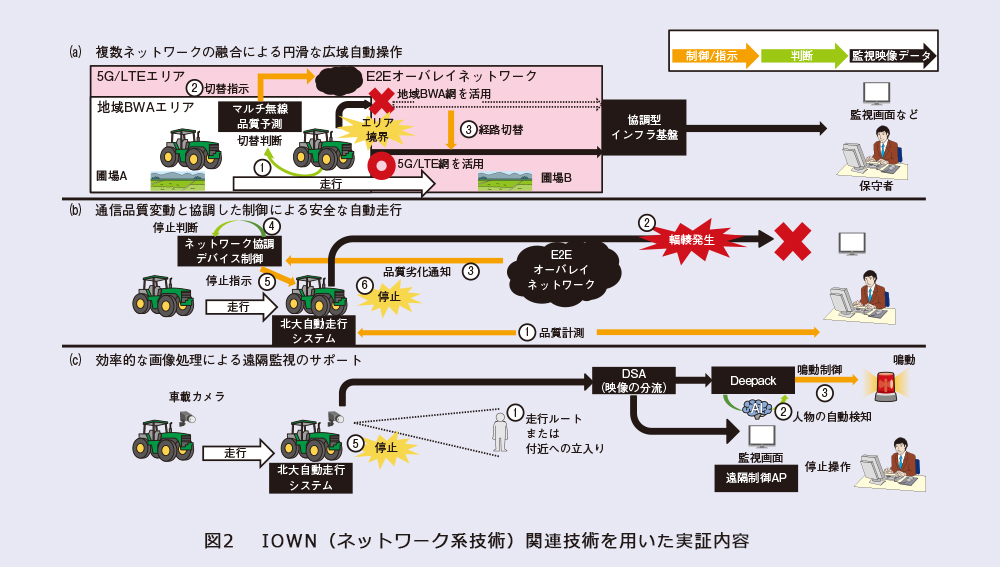
まず、(A)IOWNを実現する技術の1つとなる協調型インフラ基盤技術〔マルチ無線品質予測技術(Cradio™)、E2Eオーバレイネットワーク技術〕を用いて、複数のネットワークをまたがって農機が自動走行する中で、通信品質の変動をAIが予測して通信品質が劣化する前に適切なネットワークに自動で切り替えることで、遠隔監視を中断させることのない、安定的な自動走行を実現しました。岩見沢市の農道で実際に農機を自動走行させ、同技術を用いて通信を中断させず自動でのネットワーク切り替えに成功しました。これらの技術は、アプリケーションに利用ネットワークを意識させない、ナチュラルな利用を可能とする、将来の移動固定融合サービスにつながる技術の1つとしても位置付けられます(図2)。
また、(B)ネットワーク協調デバイス制御技術を用いて、ネットワークの品質変化に応じた農機の制御指示を実現し、監視映像が伝送できないレベルにネットワーク品質が劣化した際に、自動でトラクタを安全に停止させるなど、その有効性を確認しました(図2)。
さらに、(C)監視拠点で映像をパケットレベルで低遅延に複製することでネットワーク負荷を低減しながら、遠隔監視と画像解析などの複数の用途でのリアルタイム映像の同時利用を可能とするデータストリームアシスト技術、また深層学習では、サーバ収容率を高めるために、複数の映像ストリームを効率的に処理するストリームマージ機能やCPUやGPUなどさまざまなリソースを最適化する推論処理基盤技術により、処理を効率化しています。これらの機能により監視者の負担軽減につながる効率的な遠隔監視を実現し、その有効性を確認しました(図2)。
また、農機が自動走行するためには、高精度な測位が必要です。そのため、衛星信号を受信する固定局を農機の周辺環境に設置し、固定局から位置補正情報を配信することが求められます。従来は、農家が当該固定局を設置することから、費用面や運用面で農家の負担となる等の課題がありました。
そこで、(D)農家による固定局の設置が不要となる、「docomo IoT高精度GNSS(Global Navigation Satellite System)位置情報サービス」を用いた農機自動走行の実証を行い、高精度の測位を実現し、有効性を確認しました。これにより、低コストで高精度な測位情報の利用が可能となります。
さらに、(E)IOWNを実現する技術の1つであるクラウドGNSS測位技術を用いた農機の自動走行の実証も行いました。農機に搭載した受信機で受信されたGNSS信号と固定局からの位置補正情報を使用して、クラウド上で測位演算処理を行い、リアルタイムの測位結果を農機の自動走行の制御に使用することで、その有効性を確認しました。
クラウド上で測位の演算処理を行うことで、農機のみならず、PCやタブレット等の機器でも同時に位置情報の利用が可能になること、また、樹木などの障害物が圃場周辺にある環境下で、利用にふさわしくない衛星信号を測位処理に利用して測位精度が劣化する課題に対しても、クラウド上の潤沢な計算リソースを使い、適切な衛星信号を選択することで高精度な測位を実現することが可能となります。
■今後の展開
今後は、農機自動走行の安全性をさらに高めるため、衛星信号を用いた測位可能なエリア圏外でも農機自動走行を可能にする路面画像認識による測位補完技術の実証も行います。
また、ドローンや草刈・収穫ロボット等農機以外への遠隔監視制御対象の拡大や5Gや現行光ネットワークよりもさらに高速・大容量・低遅延なIOWN関連技術の導入を通じた、より多数の農機の遠隔監視制御、より広域での農業の自動化をめざします。
さらには、農業の生産分野にとどまらず、流通・販売・消費分野にまたがるフードバリューチェーンへと取り組みを拡大させるとともに、そこで構築した通信インフラを防災や健康等他分野での活用に広げる等、スマート農業を軸とした、生活に必要なさまざまなサービスのスマート化へとつながるスマートアグリシティの実現をめざします。
問い合わせ先
NTT研究企画部門
プロデュース担当
E-mail ta.murayama@ntt.com
URL https://www.ntt.co.jp/news2020/2011/201116b.html
研究者紹介
先端通信技術でロボットトラクタを次の段階に引き上げます
Ospina Ricardo
北海道大学大学院農学研究院
ビークルロボティクス研究室 博士研究員

日本農業の問題として農業従事者の急減と高齢化が挙げられます。それに対応するため農作業の省力化・軽労化などが求められており、最先端技術による農業再生に期待が高まっています。
そこで、当研究室ではロボットトラクタ技術や情報通信技術を駆使して農作業の効率化と安全性向上を図るための研究を行ってきました。ロボットトラクタの自動運転技術は実用段階を迎えましたが、今後は目視による監視に代わって遠隔地からの監視を行うための技術が求められています。
新しい5G通信技術とマシンビジョン用AI、レーザスキャナ、GNSSなどのさまざまなセンサを組み合わせて使用することでロボットトラクタシステムを次のレベルに引き上げることができます。遠隔監視者の下、周辺状況を遅滞なく確認できる通信システム・環境を持つロボットトラクタが圃場から次の圃場へと移動して連続的に作業を行います。危険(障害物や道路上の人など)を検知した際には緊急停止し、監視者に通知します。
当研究室・岩見沢市・NTTグループの共同プロジェクトにおいては、NTTグループの持つ高度な通信技術とデータ分析技術の農業分野への導入を積極的に進めていきたいと考えています。
担当者紹介
産学官連携とICT活用による共創~地方で起こるイノベーション~
山﨑 拓也
岩見沢市 企画財政部 企業立地情報化推進室 情報化推進係 主事

人口減少や少子高齢化が急速に進行する昨今、特に就業人口減少や担い手不足が深刻化する農業分野において、2020年農林業センサスによると、日本の農業従事者の平均年齢は約68歳、基幹的農業従事者のうち65歳以上が占める割合が69.8%で5年前と比較して4.9ポイント上昇するなど、生産性向上や労働力不足の解消が喫緊の課題となっていることは周知の事実です。労働力不足の側面以外にも、熟練農家の貴重な知恵や技術、ノウハウが失われていくことも懸念されており、暗黙知も含めた形式知化の仕組みづくりも急がれています。
2019年度からNTTグループと国立大学法人北海道大学、岩見沢市による産官学連携のもと、Society 5.0時代を見据えた地域社会づくりがスタートしており、各分野のフロントランナーとして取り組まれている大学、企業の知見や研究開発、ICT基盤や人材などのさまざまな資源等が集結し、次世代地域ネットワーク活用によるロボット農機の自動運転や遠隔監視・制御機能をはじめ、高精度測位・位置情報配信基盤、AI活用など、「可能な限り圃場の作業をロボットに任せたい」という農家のニーズを社会実装するためのイノベーションが岩見沢市で起きています。
ICTは今や社会のEssential Techとなり、これまで以上にその重要性が増しており、農業分野においても、諸課題の解決に向けてICTを駆使したスマート農業の普及と実装が求められています。若い世代を含めた農業者が日本の農業を担うという矜持を持ち、活躍ができる未来の農業をめざし、岩見沢市は産官学連携と共創のもと、スマート・アグリシティの実現に向けて取り組んでいきます。
研究者紹介
ネットワーク、デバイス、コンピューティングの協調によるスマートな社会の実現に向けて
石橋 亮太
NTTネットワーク基盤技術研究所
コグニティブファウンデーションNWプロジェクト 主任研究員

NTT研究所は、IOWNの実現につながるさまざまな技術の研究開発を行い、社会課題の解決を通じてよりスマートな社会の実現をめざしています。
北海道大学、岩見沢市、NTTグループの産官学連携によるスマート農業の実現に向けた共同検討の取り組みはその代表例です。この中でNTT研究所は、通信ネットワーク、スマート農機制御、映像転送・解析、高精度測位など多岐にわたる技術群を統合的に活用し、遠隔監視制御によるトラクタ無人自動走行の実現に向けた実証に取り組んできています。
研究には、単独の技術を磨くだけでも一筋縄ではいかない難しさと面白さがありますが、今回は、無線ネットワーク・仮想化ネットワークや画像処理などさまざまな領域に属する5つの技術群を、個別に評価するのではなく、実際のトラクタや商用の通信ネットワークも含めて協調させ総体として動作するよう組み上げ、北海道岩見沢市の実フィールドでトラクタを自動走行させて検証を行うというアプローチで取り組みました。
このチャレンジングなプロジェクトを、未曾有のコロナ禍で実験作業や準備作業などが多くの制約を受ける中にありながらも、産官学連携の関連メンバの協力によって遂行できたことは、大変な喜びです。
この取り組みをさらに発展させ、スマート農業をはじめ、NTTの技術と総合力でよりスマートな社会を実現するための研究開発活動にこれからも取り組んでいきます。


