2019年6月号
Focus on the News
総務省受託研究「膨大な数の自律型モビリティシステムを支える多様な状況に応じた周波数有効利用技術の研究開発」の研究成果をヨコスカ×スマートモビリティ・チャレンジ2019に展示
NTT、NTTドコモおよび㈱日立製作所は、2018年度より総務省受託研究「膨大な数の自律型モビリティシステムを支える多様な状況に応じた周波数有効利用技術の研究開発」を他の研究機関とともに受託し、2年間にわたり研究開発を進めてきました。この受託研究のうち、NTTは高速移動体エッジコンピューティング技術(課題ア)と大量異常トラフィック検知・判断技術(課題ウ)を、NTTドコモは高度地図データベースを効率的に配信する技術(課題イ)を、日立はネットワーク遮断・再接続技術(課題ウ)を受託し、それらについて目標とする周波数の利用効率向上に貢献する技術開発成果をあげました。そして、2019年1月24~26日に横須賀リサーチパーク(YRP)で開催された「ヨコスカ×スマートモビリティ・チャレンジ2019」において、上記の受託研究で開発した成果を統合し、クルマを中心とした自律型モビリティの公道走行を含むデモンストレーションおよびパネル展示を実施しました。
・課題ア:分散型のデータ処理等による高効率な通信処理技術(NTT*)
・課題イ:複数無線システムを用いた高度地図データベースの更新・配信技術(NTTドコモ*)
・課題ウ:大量の異常通信の検知・抑制による高信頼化技術(NTT、日立*)
*:受託代表機関
研究の成果
NTTの担当した研究開発のうち課題アについては、分散コンピューティング技術の一種であるエッジコンピューティング技術を、クルマを中心とした高速移動体向けに利用できる技術開発を行いました。具体的には、クルマなど高速移動体への大量データ送受信のため、エッジサーバ間のアプリケーションのデータ移行を、モバイル網の制御情報を活用して高速に行う技術を開発しました(図)。これにより、高速移動するクルマに対して大量の情報を分散処理で効率的に配信することが可能になります。
次に同じくNTTが担当した課題ウについては、大量のトラフィックを効率的に分析して異常を検知する異常トラフィック検知技術を自律型モビリティ向けに利用可能とする技術開発を行いました。具体的には、自律型モビリティのエッジ間移動のタイミングをとらえて移動元のエッジサーバから移動先のエッジサーバに対象モビリティの継続的な監視に必要最小限の情報を転送する分散協調型異常トラフィック検知技術を開発しました。これにより、自律型モビリティのエッジ間移動に追随した連続的かつ効率的な監視が可能になります。
NTTドコモが担当した課題イについては、自律型モビリティの走行状態やデータの用途や容量等に応じて、ダイナミックマップの差分配信や分割配信等を行う技術と、複数無線システムを連携した、動的切替や同時通信技術の技術開発を行いました。これにより、モバイル網に接続されたクルマに対して途切れることなく最新の情報を効率的に送ることが可能になります。
日立が担当した課題ウについては、大量の異常トラフィック発生に起因した大幅なデータ処理速度の低下、通信不全等の重大な脅威から自律型モビリティシステムを守るためのネットワーク遮断技術、運転手へのネットワークへの再接続および手動運転への切り替え通知技術等の研究開発を行いました。これにより、安心・安全な自律型モビリティシステムを提供するためのネットワーク高信頼化を実現することが可能になります。
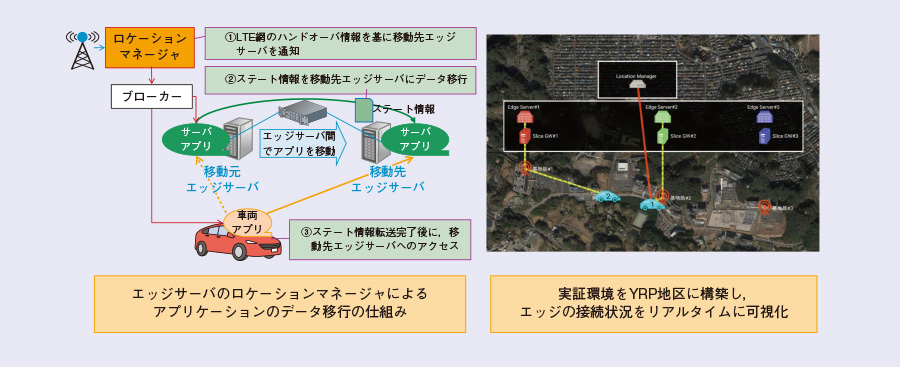
図 高速エッジ間アプリケーションデータ移行技術
問い合わせ先
NTT先端技術総合研究所
広報担当
TEL 046-240-5157
E-mail science_coretech-pr-ml@hco.ntt.co.jp
URL https://www.ntt.co.jp/news2019/1901/190124a.html
研究者紹介
大量の異常通信の検知・抑制による高信頼化技術
小村 和司/ 小河 太郎
株式会社日立製作所
IoT・クラウドサービス事業部
(左から)小河太郎/小村和司
自律型モビリティシステムは、移動体の位置や速度などを含むプローブ交通情報や、渋滞状況などを含むダイナミックマップを移動体との間で送受することで、移動体の自律的で効率的な走行を実現しています。
多様な分野への展開が期待されている自律型モビリティシステムにおいて、例えば、「自動走行に必要な情報の不達〔大量パケットの送信が原因のネットワーク機能不全(DoS攻撃)等〕」や「自動走行に必要な情報に対する攻撃(なりすまし端末やマルウェアに感染した端末によるパケットの改ざん等)」等による大量の異常トラフィック発生に起因した大幅なスループットの低下や通信不全等の重大な脅威について、異常な情報の送信やトラフィック量を検知・判断することで確実に回避することが、自律型モビリティの安全確保の観点ならびに無線通信における周波数有効利用の観点からも極めて重要な技術課題となります。
さらに悪意を持った移動体は動き続けるので、悪意を持った移動体を追随し、影響を及ぼすネットワークのみを部分的に遮断し続ける技術と安全動作への移行までの協調的な制御の研究開発を行いました。
これにより、安心・安全な自律型モビリティシステムを提供するためのネットワーク高信頼化を実現することが可能になります。
今後も、本取り組みを通して、自律型モビリティシステムの実現に貢献していきます。
研究者紹介
高度な自動運転の実現に向けて(ダイナミックマップ配信時のネットワーク負荷低減技術の開発)
新間 寛太郎
NTTドコモ
法人ビジネス本部 第一法人営業部 第五営業・第二
自動運転は、超高齢化と労働人口減少を迎える我が国においてさまざまな課題に対する解決策として期待されており、産官学が連携して実証実験等を推進している状況です。この取り組みの1つに自動運転用の高精度な三次元地図(ダイナミックマップ)があり、数年前から国が主導するSIP(戦略的イノベーション創造プログラム)を軸に実用化に向けた整備等が進められています。ダイナミックマップの普及時にはネットワークに大容量のデータが高頻度に流通することによる多大な負荷がかかることは想像に難くなく、これを見据えた技術の確立が必要との思いから本案件に取り組むことを決めました。
NTTドコモが開発した技術は、複数無線システムの連携制御技術と地図の配信制御技術の2つです。前者は通信環境や車両の走行状況等に応じて携帯電話ネットワークと無線LANネットワークの動的切替や同時通信を行う技術、後者は配信する地図の用途等に応じて配信単位やタイミング等を制御する技術です。
開発した技術の実証実験ではサービスの成立性の検証にこだわり、4つの大学の協力を得て用意した自動運転方式が異なる4台の車両に対して地図を配信して4台が同じように走行できることを確認しました。現在国内外で行われている多くの実証実験では自動運転車両からサーバまで垂直統合で構築されていますが、私たちはあらゆる車両をサポートするプラットフォームの実現をめざして研究開発を進めてきました。そのため、本案件の集大成となるヨコスカ×スマートモビリティ・チャレンジ2019のデモにおいて4台の自動運転車両が同時に走行する姿を見たときの感慨はひとしおでした。
自動運転のさらなる高度化にはネットワークの活用が必要不可欠であるため、NTTドコモとしても引き続き産官学のさまざまな方々と連携し、社会的課題の解決に貢献をしていきます.
研究者紹介
誰もが自由に移動できる社会の実現に向けて
井上 知洋
NTT未来ねっと研究所
ユビキタスサービスシステム研究部
主任研究員

将来実現が期待される「自律型モビリティシステム」とは、さまざまなモビリティ(移動体)とネットワークが連携することで車両単体での自動運転を超えた高信頼・高精度な自動走行を可能とするシステムで、社会が超高齢化と労働人口減少を迎える中、高齢者の安心・安全な生活や観光、土木、福祉等の多様な経済活動の支援等、さまざまな分野への展開が期待されています。私たちは、この実現に向けた課題について各社と共同で研究開発に取り組んできました。
例えば、自律型モビリティシステムでは膨大な数の移動体との間でリアルタイムな通信が必要となりますが、このような大量の通信をすべてクラウド(1カ所)に集めてしまうと、通信や計算処理が輻輳して正常に処理を進めることができなくなり、事故の原因となりかねません。そこでNTT未来ねっと研究所では、自律型モビリティシステムを支える分散型エッジコンピューティング基盤を開発しました。この基盤は、地域ごとに分散配置したエッジサーバによって移動体からの大量の通信を分散処理する仕組みや、移動体が地域をまたがって移動する場合はエッジサーバ間で処理を継続できる仕組みを備えています。
この基盤の上に各社が研究開発した成果を統合し、YRP地区でのイベントにおいて一般市民を中心とした約3000人の来場者に自動走行等のデモを行い、将来のモビリティ社会の姿をアピールしました。今後、自動車会社との連携等も進めて、自律型モビリティシステムをいち早く実現するための研究開発を行っていきます。


