R&Dホットコーナー
協調型インフラ基盤を用いた自動運転フィールド実証の取り組み
- IOWN
- Cyber-Physical Systems
- 自動運転遠隔監視
本稿では、NTT研究所が開発した協調型インフラ基盤を活用した自動運転フィールド実証の取り組みを紹介します。協調型インフラ基盤は、遠隔監視における安定した通信を確保し、自動運転の安全性向上に寄与しています。また、この技術はNTTドコモが開発した自動運転遠隔管制システムの通信機能として利用されており、NTTドコモと連携してフィールド実証を行っています。
河野 太一(かわの たいち)†1/東 信博(あずま のぶひろ)†1
藤永 岳浩(ふじなが たけひろ)†1/東條 琢也(とうじょう たくや)†1
桑原 健(くわはら たけし)†1/佐々木 元晴(ささき もとはる)†2
中村 光貴(なかむら みつき)†2 /河村 憲一(かわむら けんいち)†2
安川 真平(やすかわ しんぺい)†3/戸田 充(とだ みつる)†3
西川 治貴(にしかわ はるき)†3
NTTネットワークサービスシステム研究所†1
NTTアクセスサービスシステム研究所†2
NTTドコモ†3
自動運転向け遠隔管制システムにおける無線通信の課題
2023年4月に道路交通法が改正され、公道でのドライバーレス自動運転が可能となる自動運転レベル4が解禁されました。自動運転の実現は、ドライバー不足の解消や高齢者・障がい者の移動手段の確保、交通事故の減少、さらには物流の効率化など、社会全体にさまざまな効用をもたらすことが期待されています。
しかし、自動運転レベル4を安全に運用するためには、いくつかの条件が義務化されています。その中でも重要なのが、オペレータによる映像を通じた遠隔監視です。これは、車両の運行状況をリアルタイムで監視し、必要に応じてオペレータが遠隔で状況確認・対応できるようにするために不可欠な要素です。映像監視にはモバイル通信を介したデータ伝送が必要ですが、大容量通信を高い信頼性で実現することが大きな課題となります。
特に技術的な課題として挙げられるのは、車両の移動により通信環境が常に変動する点です。通信品質は、高層ビルや高架などの遮蔽物が電波を減衰させることや、エリア内の利用者数の増加に伴う通信の混雑による影響を受けます。これらの要因の影響が車両の移動により変動することで、通信品質も変動します。通信が不安定になると、映像が途切れたり遅延が発生したりする可能性があり、その結果、オペレータが適切なタイミングで車両に対応できなくなるリスクが生じます。
これらの課題を解決するために、NTT研究所では、安定したモバイル通信を実現するための「協調型インフラ基盤」を開発しています。この基盤は、端末、ネットワーク、クラウドを連携させ、通信環境の変動に柔軟に対応できるようにすることで、安定したデータ伝送を確保することをめざしています。これにより、オペレータがリアルタイムで車両の状況を把握し、安全かつ効率的な自動運転を支援することが可能になります。
協調型インフラ基盤
協調型インフラ基盤は、ミッションクリティカルなCPS(Cyber-Physical Systems)サービスの収容を目的とした基盤技術です(1)。
本稿では自動運転遠隔監視において特に求められる、車両―クラウド間の通信高信頼化に資する要素技術を紹介します。
CPSサービスは、制御の遅れが致命的な結果をもたらす可能性があるため、その収容にあたっては極めて高い信頼性・リアルタイム性が求められます。
一方、車両のように走行中周囲環境が変化し続けるケースでは、各種外乱要因により通信品質が大きく変動するため、高信頼性・リアルタイム性の維持が困難です。
解決策として、例えば車両側で通信品質を測定し、品質劣化検知を契機に利用回線を切り替えるアプローチが考えられますが、品質劣化が急激に発生するような場合、その検知や回線切り替えが間に合わず、通信が途絶する可能性があります。
これに対し、協調型インフラ基盤は通信品質を継続的に予測し、品質劣化が予測される回線の利用を事前に回避することで、急激な品質劣化が発生する環境下においても高信頼な通信を実現します。
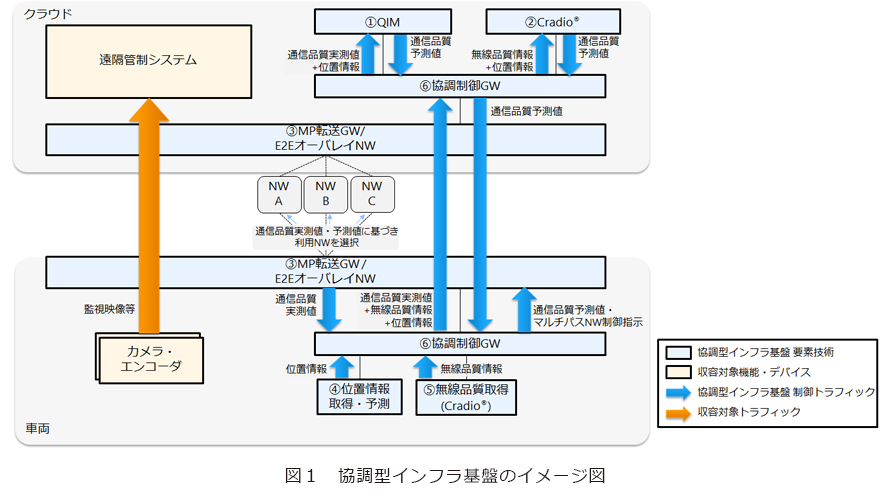
協調型インフラ基盤は図1のとおり、車両側、クラウド側に配備される複数の要素技術から構成されます。
具体的には、通信品質予測を行う①QIM(Quality Index Map)(2)および②Cradio®(マルチ無線プロアクティブ制御技術)(3)、③予測値を基に複数回線振分をパケット単位で行うMP転送GW(マルチパス転送ゲートウェイ)(4)およびフロー単位で行うE2EオーバーレイNW(End-to-Endオーバレイネットワーク)(1)、予測に必要な情報を収集する④位置情報収集・予測機能および⑤無線品質取得機能と、制御情報流通を担う⑥協調制御ゲートウェイが緊密に連携し動作します。
この中でも特に、①QIMは実サービスの通信(監視映像等)の通信品質実測値を基に特定の日時・エリア単位で通信品質を学習し、学習結果を基に品質推定を行う技術であり、実サービスの通信を基にパッシブに継続学習することで、学習のためのプローブパケットが不要で可用帯域を圧迫せず、かつ、直近の周囲環境の変化を取り込んだ高精度な品質推定を実現します。
また、②Cradio®は、時々刻々と変化するユーザ要求と電波状況に追従することで、ユーザに無線ネットワークを意識させないナチュラルな通信環境を提供し続けることを目的とした無線技術群で、把握・予測・制御の3つの技術群で構成されています。ここでは、各種無線通信装置から収集した情報と機械学習を用いて、将来走行位置での無線通信品質を予測する予測技術を使用しています。
さらに、③MP転送GWは標準化中の最新技術であるMPQUIC(Multipath extension for QUIC)(5)のStreamおよびDatagram frameを用いて透過的にパケットを転送するもので、通信品質予測値・実測値を基にしたパケット単位の回線振り分け・アグリゲーションをはじめとする、高信頼・リアルタイムなパケット伝送のためのさまざまなNW制御機能を提供します。
このように、協調型インフラ基盤は高精度な品質予測、および品質予測を基にした高度なNW制御等の高度な連携により、急激な品質劣化が発生する環境においても高信頼・リアルタイムな通信を実現します。
協調型インフラ基盤の遠隔管制システムへの適用
自動運転遠隔管制システムは、運転者が不在であっても、自動運転車両の安全で効率的な運行を確保するためのシステムです(図2)。このシステムは、車両の状況をリアルタイムで監視し、必要に応じて遠隔から対応することで、異常発生時にも迅速な対応が可能となります。

■遠隔管制業務
遠隔管制業務は、車両の運転以外の乗務員業務を遠隔から実施します。主な業務には以下の2つの側面があります。
① 乗客安全・サポート: 乗客の安全を確保し、必要に応じてサポートを行うことが重要です。遠隔管制システムでは、事故対応や車内での不審者対応、着座確認、乗客からの問合せ対応が行われます。これにより、運転者が不在でも車内の安全が維持され、乗客の安心が確保されます。
② 運行管理: 車両の配車や定刻管理、運賃の確認といった運行管理業務も遠隔から行います。自動運転車両がスムーズに運行できるように、これらの業務を適切に管理し、運行が遅延しないようにサポートします。
これ以外にも、一部の自動運転ではRemote assistance [SAE J3016]といわれる自動運転システムに対するオペレータからのサポートも一部では利用されています。これは例えば工事現場などで、自動運転システムからの要請に基づきオペレータが走行パスなどに関する「ガイダンス」を自動運転システムが行うものです。
このようにして、「走る・止まる・曲がる」の動的な運転操作は自動運転車両に搭載された自動運転システムが担いつつも、遠隔監視によりドライバーレス自動運転を安全に運行することができます。
■遠隔管制システム
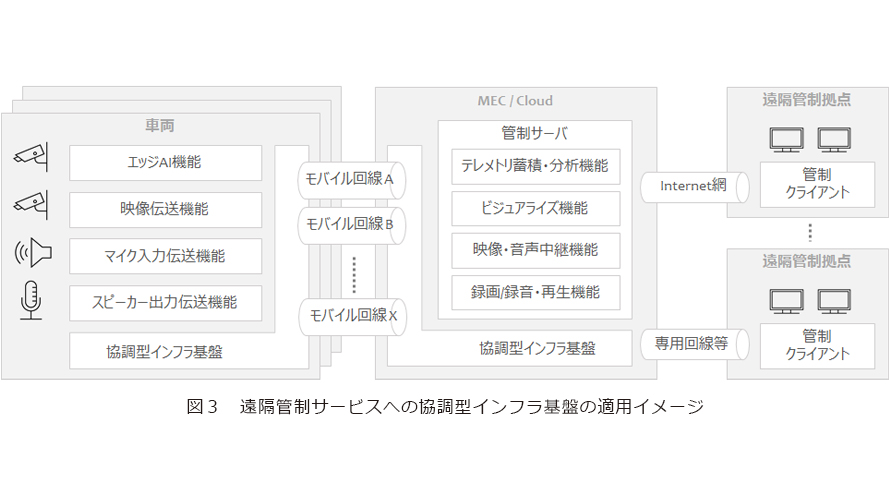
NTTドコモは、自動運転レベル4をサポートする遠隔管制システムを開発しています。本システムは、自動運転車両、MEC(Multi-access Edge Computing)・クラウド上の管制サーバ、遠隔管制拠点の遠隔クライアントにまたがって構成されており、遠隔管制業務を支援するために、車両、遠隔管制室間の映像、音声、テレメトリの伝送や遠隔管制サーバ上のさまざまな処理機能を備えています(図3)。
① 自動運転車両:車両にはカメラ、マイク、センサが搭載されており、これらのデータはリアルタイムで管制サーバに送信されています。また、異常検知のためのエッジAI(人工知能)機能が備わっており、異常が検知された場合には管制サーバを介して遠隔管制拠点のクライアントに即座に通知されます。この仕組みにより、異常発生時には迅速な対応が可能です。車両は自律的に走行しますが、支援が必要な場合には、遠隔からの指示を受けることも可能です。
② 管制サーバ:管制サーバは、自動運転車両から送信された映像や音声、テレメトリデータを中継や処理をします。管制サーバには、テレメトリデータの蓄積・分析機能やビジュアライズ機能を備えているため、リアルタイムで状況を把握できます。これにより、車内の安全を自動で確認しながら運行を行い、異常が発生した際には、迅速な分析とアラート発信が行われ、速やかな対応が実現できます。
③ 管制クライアント:遠隔管制拠点のオペレータは、管制クライアントを通じて車両の状況を常に監視しています。リアルタイムで受信される映像や音声を基に、異常や緊急事態が発生した場合には、車両を遠隔操作で停止させたり、乗客と音声で通話したりすることが可能です。これにより、現場にいなくても安全な運行が可能になります。
■遠隔管制システムの通信要件
遠隔管制システムの通信要件は、信頼性とリアルタイム性が非常に重要です。主に以下の要件が満たされる必要があります。
① リアルタイム性:映像、音声、テレメトリデータは、遅延なくリアルタイムで伝送される必要があります。例えば、車両の位置情報や状態データは、ほぼ即時に更新される必要があり、特に緊急時には迅速な対応が求められます。
② 信頼性:映像や音声、テレメトリのデータは途切れることなく安定して伝送される必要があります。データの欠損や遅延があってはならず、異常が発生した際にはすぐに通知が行われる仕組みが求められます。また、これらの通信が中断された場合、迅速に復旧できる仕組みも必要です。
■協調型インフラ基盤の適用
NTTドコモの自動運転遠隔管制システムでは、通信要件を満たすために、試験的に車両と管制サーバ間の通信に協調型インフラ基盤を活用しています(図3)。協調型インフラ基盤を利用することで、車両と管制サーバ間の通信が途切れることなく、安定して行われます。これにより、リアルタイムでのデータ伝送が可能となり、車両の状態や位置情報、映像、音声データが安定して伝送され、自動運転遠隔管制システムによる自動運転車両の安全で効率的な運行の確保を実現します。
自動運転フィールド実証
協調型インフラ基盤を適用した遠隔管制システムは2024年1月22日~2月2日にかけて実施された神奈川県平塚市での路線バス自動運転実証実験で利用されました。
実証実験は特定条件下において運転手を必要としない完全自動運転が可能なレベル4の自動運転をめざして行われており、NTTドコモが遠隔管制システムを提供しています。バスの車内にカメラを設置、そのカメラで撮影された映像が協調型インフラ基盤を通して遠隔監視室に送られ、途切れのない安定した映像を監視することで運転手がいなくなった場合にも遠隔から車両側の状況を確認し、安全を確保します。実証実験の車両と車両に搭載した機器を図4に示します。
協調型インフラ基盤を用いない場合、場所や時間帯等、状況によっては長時間の途絶が発生することもあります。協調型インフラ基盤を適用した遠隔管制システムではネットワーク品質の良い回線をプロアクティブ・リアクティブに選択をすることで、長時間の途絶は発生せず、安定した映像が伝送できていることを確認しています。
今後、実証で得られた経験や課題を基に技術を発展させ、2024年度にも平塚で行われるレベル4の自動運転の実現に向けた実証実験で協調型インフラ基盤を適用した遠隔管制システムを提供する予定です。

今後の展開
本稿では、NTT研究所が開発した協調型インフラ基盤を用いた自動運転フィールド実証の取り組みについて紹介しました。協調型インフラ基盤は、自動運転車両の遠隔監視において、通信品質の変動に柔軟に対応し、安定したデータ伝送を実現する技術です。NTTドコモと連携し、2023年度の実証実験では、この基盤を活用して、自動運転車両の安全性と信頼性を向上させる成果を確認しました。
今後は、レベル4の自動運転遠隔管制サービスの実現に向け、さらに実証実験を重ね、技術改善を図っていきます。また、自動運転に限らず、ドローンやスマートファクトリーなど、他の高信頼な無線通信を必要とするユースケースへの技術展開や、新たな要素技術の開発をめざしていきます。
■参考文献
(1) 桑原・石橋・川上・益谷・山本・安川:“ミッションクリティカルなサービス提供を可能とする協調型インフラ基盤,”NTT技術ジャーナル,Vol. 33, No. 8, pp.29-33, 2021.
(2) 小野・河野・笛木・東條:“NW品質特性を表現する確率分布に基づく品質推定方式の検討,”信学技報, Vol. 124, No. 106, NS2024-72, pp. 152-157, 2024.
(3) 河村・守山・小川・淺井・鷹取:“エクストリームNaaSに向けた無線技術──マルチ無線プロアクティブ制御技術Cradio®,”NTT技術ジャーナル,Vol. 33, No. 8, pp.19-23, 2021.
(4) 岩澤・徳永・小松・東條:“V2N通信安定化に向けたMPQUICゲートウェイの提案,”信学ソ大,B-6-17,2023.
(5) Y. Liu, Y. Ma, Q. De Coninck, O. Bonaventure, C. Huitema, and M. Kuehlewind: “Multipath Extension for QUIC,” IETF Internet-Draft draft-ietf-quic-multipath-04, March 2023.

(上段左から)河野 太一/東 信博/藤永 岳浩/東條 琢也
(中段左から)桑原 健/佐々木 元晴/中村 光貴/河村 憲一
(下段左から)安川 真平/戸田 充/西川 治貴
問い合わせ先
NTTネットワークサービスシステム研究所
ネットワーク基盤技術研究プロジェクト
E-mail cip-exp@ntt.com



協調型インフラ基盤は、安定したモバイル通信を提供する技術です。自動運転の遠隔管制だけでなく、さまざまなユースケースに対応するため、技術開発をさらに推進していきます。