2021年8月号
特集
ミッションクリティカルなサービス提供を可能とする協調型インフラ基盤
- IOWN
- オールフォトニクス・ネットワーク
- 協調型インフラ基盤
さまざまな社会問題を解決するため、社会インフラとしてのネットワーク技術とコンピューティング技術の融合に取り組んでいます。本稿では、自動走行農機の遠隔監視制御、高度コネクテッドカー、スマートシティ等の分野で情報処理、ネットワーク、デバイスの3つのドメイン間で協調制御を用いることで、エンド・ツー・エンド(E2E)でサービス要件を満足しミッションクリティカルなサービスの提供を可能とすることをめざし、研究開発を進めている協調型インフラ基盤について紹介します。
桑原 健(くわはら たけし)/石橋 亮太(いしばし りょうた)
川上 健太(かわかみ けんた)/益谷 仁士(ますたに ひとし)
山本 浩司(やまもと ひろし)/安川 正祥(やすかわ せいしょう)
NTTネットワークサービスシステム研究所
背景
近年、CPS(Cyber-Physical System)の概念の下、現実世界(フィジカルシステム)におけるさまざまなセンサ情報などをネットワークを介して収集し、情報処理基盤上で構成されるサイバー空間において収集した情報を分析し、現実世界のシステム制御やシステム間のデータ流通に活用する取り組みが進められています。IOWN(Innovative Optical and Wireless Network)構想においても、CPSのユースケース(1)として、スマートシティにおける監視カメラなどのエリアマネージメント、コネクテッドカーなどのモビリティマネージメント、インダストリーマネージメントを高度化し、新たな社会インフラの実現をめざした検討が進められています。
CPSにおいては、従来のインターネットやクラウドとは異なり、カメラやセンサなど超多数のデバイスから大量の情報を収集する必要があり、膨大な上り方向のトラフィックをネットワークを介して効率的に収集する仕組みが必要となります。また、自動運転バスや自動搬送システムにおいて、フィジカルシステムの映像ストリームや位置情報などのセンシング情報を用いて、サイバー空間上からフィジカルシステムへフィードバック制御(アクチュエイト)を行うリアルタイム性の高いユースケースでは、ネットワークだけではなく、サイバー空間を構成するコンピューティング基盤やフィジカルシステムであるデバイス側のシステムも含めて、エンド・ツー・エンド(E2E)での低遅延性や安定的なデータ処理が求められると考えています。
本稿では、IOWN構想においてCPSなどのミッションクリティカルなサービスの提供に向けて取り組んでいる協調型インフラ基盤の技術概要、およびスマート農業への適用を行ったフィールド実証について紹介します。
協調型インフラ基盤の技術概要
■コンセプトと基本アーキテクチャ
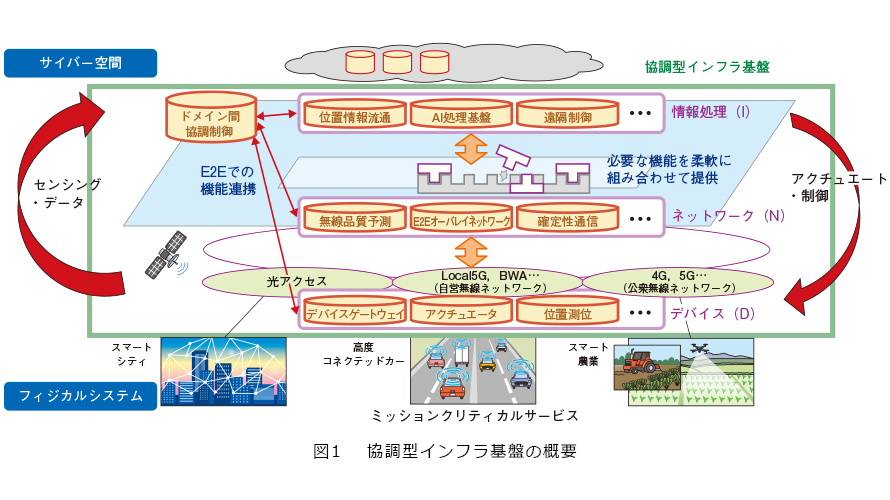
協調型インフラ基盤は、オールフォトニクス・ネットワーク(APN)や種々の無線ネットワークを活用しつつ、情報処理基盤やデバイス機能と機能連携させることで、従来のインターネットやクラウドでは実現できない高度なサービスを提供することをめざした基盤技術です。協調型インフラ基盤の基本アーキテクチャを図1に示します。情報処理(I)、ネットワーク(N)、デバイス(D)の各ドメインの要素機能群と制御機能から構成され、それらが協調制御されることで、E2Eでミッションクリティカルなサービス要件をサポートします。各ドメインの要素機能は、提供サービスに応じて機能を組み合わせて構成可能とすることを志向しており、これによりMEC(Multi-access Edge Computing)やエッジDCの基盤として柔軟に機能配備することをめざしています。
■ドメイン間協調制御
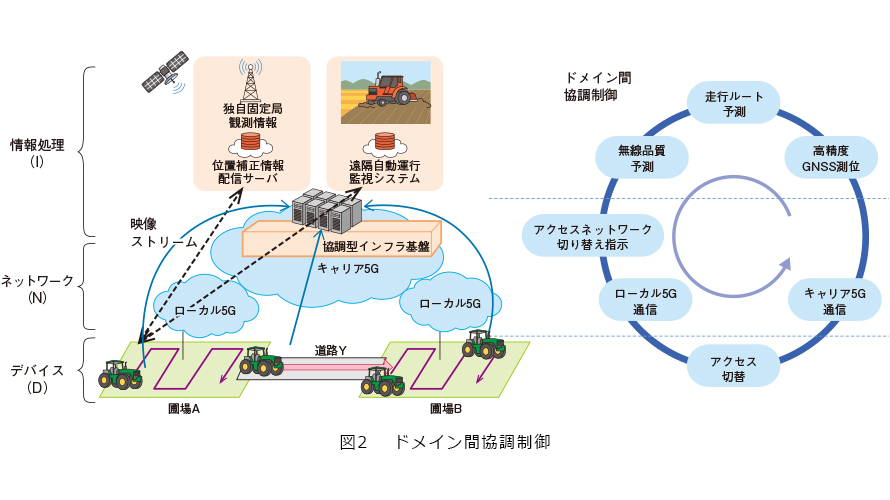
具体的なユースケースに基づき、協調型インフラ基盤のドメイン間協調制御について説明します。図2はトラクタの自動走行のユースケースと協調制御の動作概要を示しています。このユースケースでは、自動走行するロボットトラクタが圃場Aから圃場Bへ移動する際に、ローカル5G(第5世代移動通信システム)とキャリア5Gによる複数の無線アクセスを経由しながら、遠隔監視用の映像ストリームを監視センタへ送り、緊急時には遠隔から停止操作を実施する必要があります。この際、オペレータが遠隔から常時、トラクタの監視や緊急停止制御を行う必要があるため、監視映像や制御信号が無線ネットワークの切り替えに影響を受けることなく、伝送されることが重要となります。
協調型インフラ基盤による動作概要は、次のとおりです。まず、デバイス上での高精度GNSS(全球測位衛星システム)測位により、トラクタの位置を測定します。次に得られた位置情報から、走行ルートの予測を行い、未来位置における無線ネットワークの品質予測を行います。その結果、監視映像や制御信号の伝送に影響が出る程度にネットワーク品質が劣化することを予測した場合、実際に品質劣化が起こる前に、例えば、ローカル5Gからキャリア5Gへ無線ネットワークの切替制御を行います。このように情報処理(I)、ネットワーク(N)、デバイス(D)を協調動作させることで、複数の無線ネットワーク間でシームレスな切替が可能となります。
協調型インフラ基盤のスマート農業への適用に関する取り組み
NTTネットワークサービスシステム研究所では、協調型インフラ基盤の適用先として、少子化、高齢化による労働力不足が社会課題となっている農業への取り組みを進めています。これまで、北海道大学、北海道岩見沢市、NTT、NTT東日本、NTTドコモの間で産学官連携協定を提携し、最先端のロボット技術と、IOWNによる情報通信技術の活用による世界トップレベルのスマート農業の実現に向けた研究、技術開発に取り組んできました。2020年11月には、岩見沢市にて実証実験(2)を行っており、以下、その内容を中心に協調型インフラ基盤により実現される効用について紹介します。
■農機レベル3自動走行における課題
農業分野において注目度が高い課題の1つに、「レベル3農機自動走行の実現」が挙げられます。自動車と同様に農機においても、自動化のレベルが定められており、現時点ではレベル2と呼ばれる、使用者の有視界監視下での無人状態の自動運転が可能な農機が市販されています。レベル2では、使用者が圃場周囲から直接の目視、または無線LANなどのローカルの通信ネットワークを介したタブレット端末等を用いて、対象農機の監視と、危険発生時の停止等の緊急操作を行います。なお、市販の自動走行対応農機では、カメラや距離センサなどを備え、自律的に危険を検知し自動停止を行う機能を有しています。
これに対し、レベル3の自動走行では、監視センタなどの圃場から離れた場所から監視と制御を行うため、5G/LTEなどの通信ネットワークを介して監視映像や制御情報を遠隔地と農機の間で伝送する必要があります。圃場内の作業時だけではなく、格納庫や圃場間を結ぶ道路の走行が含まれることに加えて、遠隔の監視センタなどで多数の農機に対する遠隔監視制御を可能とすることで、農機を用いた農作業全体のさらなる省力化やシェアリングモデルへの新たなビジネス展開が期待されています。一方で遠隔から監視制御を行ううえでは、トラクタからの映像を高品質で転送することに加えて、緊急時にはオペレータが監視映像を元に緊急停止の操作を行う必要があり、ネットワークを含めたシステム全体として低遅延でかつ安定的に遠隔監視を実現することが技術的な課題となっています。
■協調型インフラ基盤を活用した農機自動走行のフィールド実証
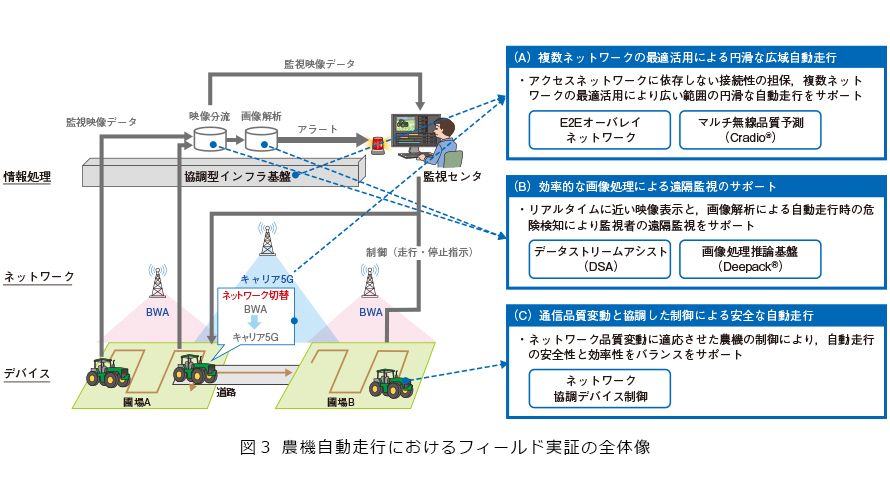
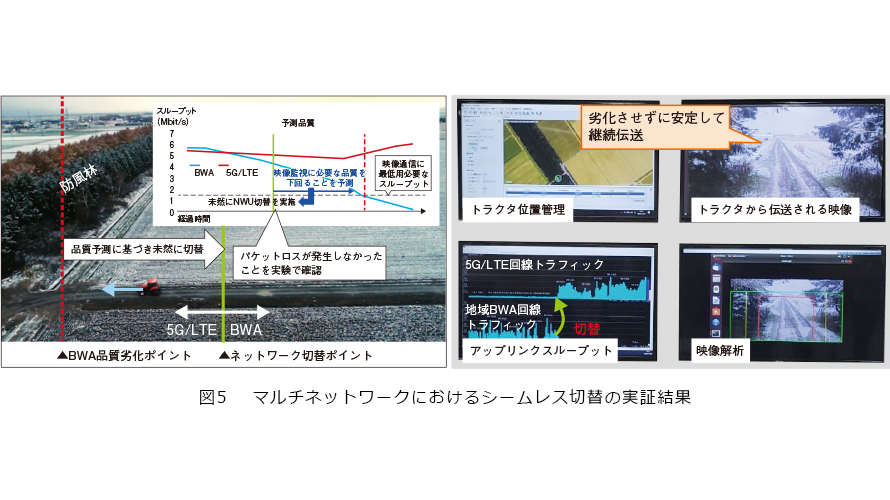
協調型インフラ基盤は、前述のとおり、複数の要素技術を協調的に動作させることでネットワークに社会インフラとして必要な付加価値を提供することをめざしています。岩見沢市で実証した内容の全体構成とシナリオごとの動作概要を図3、4に示します。
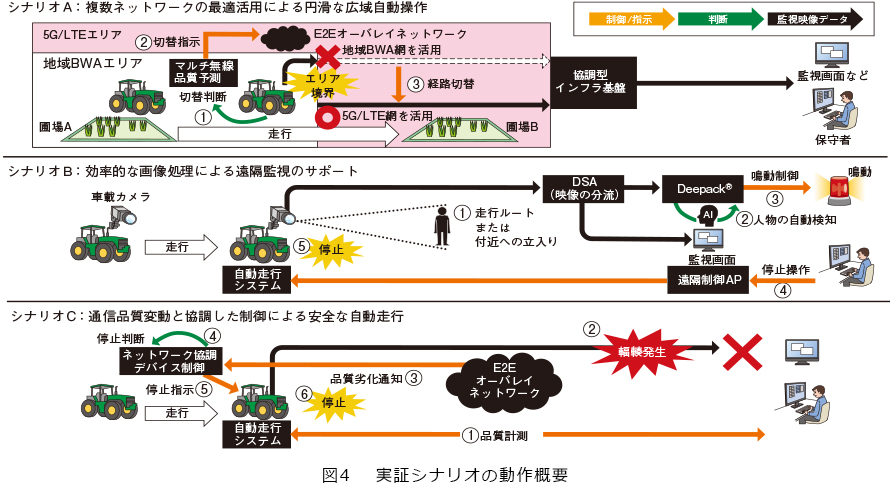
まず、シナリオAでは、協調型インフラ基盤技術の構成要素として、E2Eオーバレイネットワーク技術、マルチ無線品質予測技術(CradioⓇ)(3)を用いて、複数のネットワークをまたがって農機が自動走行する中で、通信品質の変動をAI(人工知能)が予測をして通信品質が劣化する前に、適切なネットワークに自動的に切り替えることで、「途切れないネットワーク」を実現し、安定的な自動走行の遠隔監視制御を実現しました。岩見沢市の農道で実際に農機を自動走行させ、同技術を用いて通信を中断させず自動でネットワーク切替に成功した実証結果を図5に示します。
また、シナリオBでは、遠隔監視において映像ストリームをパケットレベルで低遅延に複製することで、ネットワーク負荷を低減しながら、遠隔監視と画像解析などの複数の用途でのリアルタイム映像の同時利用を可能とするデータストリームアシスト技術(4)を適用し、深層学習ではサーバ収容率を高めるために、複数の映像ストリームを効率的に処理するストリームマージ機能やCPU/GPUなどさまざまなリソースを最適化する推論処理基盤技術により、監視用の映像ストリームの処理を効率化しています。さらに、シナリオCでは、ネットワーク協調デバイス制御技術を用いて、ネットワークの品質変化に応じた農機の制御支持を実現し、監視映像が伝送できないレベルにネットワーク品質が劣化した際に、自動でトラクタを安全に停止させるなど、その有効性を確認しました。
今後の展開
本稿では、IOWN構想においてミッションクリティカルなサービスの提供に向けて取り組んでいる協調型インフラ基盤の概要、および岩見沢市で実施したトラクタ自動走行の遠隔監視制御のフィールド実証について紹介しました。今後は、スマート農業に加えて、高度コネクテッドカーなどの高速移動体のユースケースへの検討を通じて、協調型インフラ基盤の適用性の拡大と統合アーキテクチャならびに要素技術の確立を進めていきます。
■参考文献
(1) https://iowngf.org/wp-content/uploads/formidable/21/IOWN-GF-RD-CPS_Use_Case_Interim_Report__2.0-1.pdf
(2) https://www.ntt.co.jp/news2020/2011/pdf/201116b.pdf
(3) 若尾・河村・守山:“複数無線アクセス最適利.のための品質予測技術,”NTT技術ジャーナル,Vol.32,No.4,pp.11-13,2020.
(4) 肥後・鍔木・越地・椿・桑原:“IoTサービスを支えるデータストリームアシスト技術,”NTT技術ジャーナル,Vol.30,No.7,pp.19-24,2018.
(左から)川上 健太/石橋 亮太/益谷 仁士/山本 浩司/桑原 健/安川 正祥





IOWN構想の具現化に向けて、協調型インフラ基盤の研究開発を進めています。ネットワークと情報処理基盤、デバイスらが協調制御されることで、これまで実現が困難であったミッションクリティカルなサービスをサポートする社会インフラを実現し、さまざまな社会問題の解決に貢献することをめざしていきます。