2025年6月号
特集
農業の自動化を支える2大技術としてのドローンセンシング・ロボット自動化
- アグリテック
- 農業ドローン
- 除草ロボット
NTTドコモでは、日本の農業が抱える人手不足の課題を解決する自動化技術の研究開発を行っています。特に農作業の除草の課題に着目し、画像認識技術に基づくセンシング、リアルタイムな制御がコア技術となります。ドローンセンシングでは広大な農地に対し雑草や病害を特定してピンポイント防除につなげます。またロボット自動化ではAI(人工知能)を搭載した自律走行型ロボットが作物を避けながら除草作業を代行します。
山谷 佳祐(やまや けいすけ)†1/佐藤 弘之(さとう ひろゆき)†1
水野 涼介(みずの りょうすけ)†1/中村 圭佑(なかむら けいすけ)†1
小圷 勇亮(こあくつ ゆうすけ)†1/北出 卓也(きたで たくや)†1
松村 択磨(まつむら たくま)†2
NTTドコモ†1
ドコモ・テクノロジ†2
NTTドコモがめざすアグリテックの全体像
NTTドコモが農業分野でめざすのは、「AI(人工知能)×データ分析」と「AI×ロボット」の技術を融合させることで、農業プロセス全体にわたるトータルソリューションを創出することです。最終的な目標は、播種から圃場管理、収穫・選別・出荷に至る栽培フロー全体の自動化ですが、特に農作業の中でも労働負荷が極めて大きい「除草」と「病害虫対策」の圃場管理作業効率化・自動化に重点を置いて開発を進めています(図1)。
こうしたソリューション提供に向けて、アプローチは大きく2段階に分かれます。第1段階では、圃場の状態を「検知・計測」し、得られたデータから「未来予測・知の発見」を行います。具体的には、ドローン空撮画像からの雑草検知(例:水稲、牧草地など)、近接撮影画像からの病害検知〔例:甜菜、じゃがいも(馬鈴しょ)など〕、作物の生育状況把握(例:麦の穂数計数)、圃場の環境データと合わせた生育予測、そしてそれらに基づく最適な作業計画の立案(例:ドローンによる効率的な飛行・作業計画、麦の施肥量計画)などが含まれます。
第2段階は、立てられた計画やその場の圃場状態に応じて、物理的な作業を自動で実行する「アクチュエイト」です。これには、畑作・稲作用の小型除草ロボットによる除草作業や、ドローンによる雑草・病害個所への自動農薬散布などが該当します。これら「検知・計測」から「アクチュエイト」までの一連の流れをAIで高度化・自動化することで、省力化や生産性向上、および環境負荷低減に貢献することをめざしています。

空からのドローンセンシングと画像認識
■牧草地の雑草管理
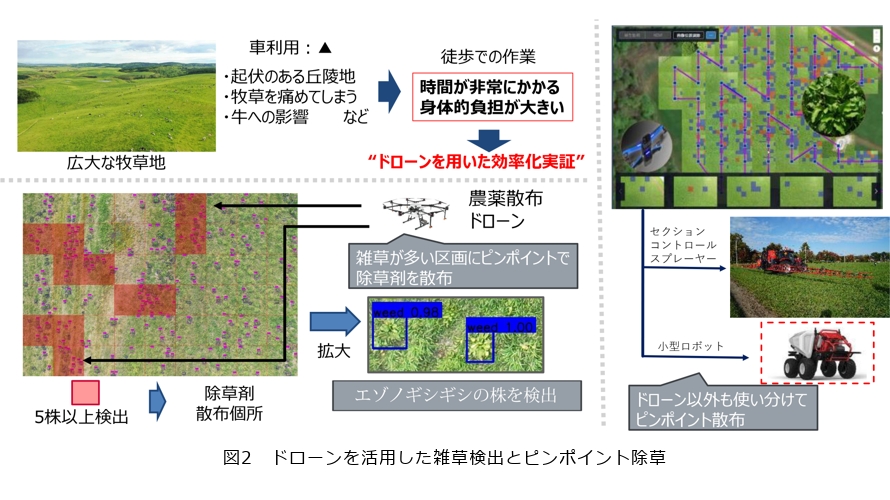
北海道の広大な牧草地(1500ha規模)では、雑草管理が重要な課題となっています。特定の雑草(例:エゾノギシギシ、オニアザミなど)は、牛が採食しないうえに、栄養価の高い牧草の生育を阻害し、放置すると圃場全体に拡散してしまいます。しかし、広大で起伏のある地形のため、作業員が徒歩で見回りながらの手作業による除草や、背負い式の散布機で除草剤を撒くといった作業は、膨大な時間と労力を要し現実的ではありません。そのため、数年ごとに牧草地の生産性回復を目的として実施する草地更新の際には、除草剤のコストが膨らむものの全面散布を行う必要がありました(1)。
この課題に対し、私たちはドローンを用いた効率的な雑草検出技術を開発し、ピンポイントな除草作業の自動化を実現します(図2)。自動化の全体像としては、はじめにドローン画像の空撮、次に画像認識AIによる雑草位置の検出、最後に検出結果に基づいた農薬の自動散布の流れとなっています。
ドローン画像の空撮部分から見ていくと、ドローンを用いて一定高度から牧草地を自動飛行させながら高解像度の空撮画像を取得します。次に、取得した広範囲の画像を解析しやすいように小さな区画に分割します。分割された各画像に対して、独自に学習した物体検出モデル*を用いて、ターゲットとする雑草(エゾノギシギシ、オニアザミなど)の位置を検出します。検出精度を高めるために、さまざまな条件下での画像を含む大規模なデータセットを3年間にわたり実証実験の中で構築し、学習に用いています(2)。
続いて、検出された個々の雑草の位置情報を、ドローンの飛行ログから得られるGNSS(Global Navigation Satellite System)座標と紐付けることで、牧草地全体のどこに、どの程度の密度で雑草が発生しているかを可視化したマップを作成します。これにより、従来は作業員の経験と勘に頼っていた雑草の分布状況を客観的なデータとして把握できるようになります。
さらに、この分布状況マップはその後の除草作業を効率化するために活用され、雑草の分布に基づいた効率的な農薬散布ルートを自動生成する機能を備えています。
具体的な使用方法は、農薬や液体肥料を入れるタンクと、それを均一に散布するためのノズルを備えた「農薬散布ドローン」と連携させることで、マップ上で雑草が密生しているエリアにだけピンポイントで除草剤を散布することが可能になります。特に大型の機械などが利用しにくい丘陵地のような土地に適したソリューションとなっています。また、「農薬散布ドローン」以外にも小型の散布ロボットやトラクターに装着された「セクションコントロールスプレーヤー」(散布ブームの各部分を個別にON/OFF制御できる噴霧器)とも連携することができるようになっており、除草剤の使用量を大幅に削減でき、コスト削減と環境負荷低減の両立が期待されます。
2022年7月には、北海道釧路管内の鶴居村で、ホクレン農業協同組合連合会および北海道が主催する「ICT活用型草地管理普及促進事業に関する現地研修会」として、このドローン雑草検出システムのデモンストレーションが行われました。参加した生産者やJA関係者からは、「作業員が目で見て感じていた雑草の多さと、AIの検出結果がよく一致している」「遠目にはほとんど雑草が見えないような場所でも、AIが正確に検知していて驚いた」といった肯定的なフィードバックが多く得られました。一方で、過去に訓子府(くんねっぷ)地域での実証実験をした際には、雑草が非常に密集して繁茂し、個々の株の境界が不明瞭になっている圃場も確認されました。このような株が密集した状況では、AIが個別の株を認識できずに検出漏れを起こす場合があることも課題として確認されました。ユーザ(生産者)の期待する「雑草が多いエリア」という目で見て得られる情報とは乖離が生じるため改善を図るべく、2023年から2年間の実証実験や(3)、ホクレン社のセンシングサービスとして提供をする中でより細かく学習データをつくり込むことや、最新の画像認識モデルの適用などにより、密集株であっても漏れなく検出ができるように性能向上に努めています。この技術は林業分野でも用いられ、ドローン画像をもとにした山間部の現場状況確認(切株、林地残材の状態)の解析技術にも応用されています。
* 物体検出モデル: 画像の中から特定の物体を見つけ出し、その位置と種類を特定するための画像認識AI技術。
■じゃがいも(馬鈴しょ)の異常株認識
じゃがいも(馬鈴しょ)の圃場では、ウイルス病などの病気に罹患した株(異常株)を早期に発見し、圃場から除去(抜き取り)することが、病気の蔓延を防ぎ、健全な種芋を生産するうえで非常に重要となります。しかし、現在は病気の専門知識を有する調査員と生産者が 広大な圃場をくまなく目視して見回ることで発病株の探索、抜き取り作業を実施しています。異常株の検出や抜き取り等にかかる作業は熟練した技術と多大な労力を必要としています(4)。
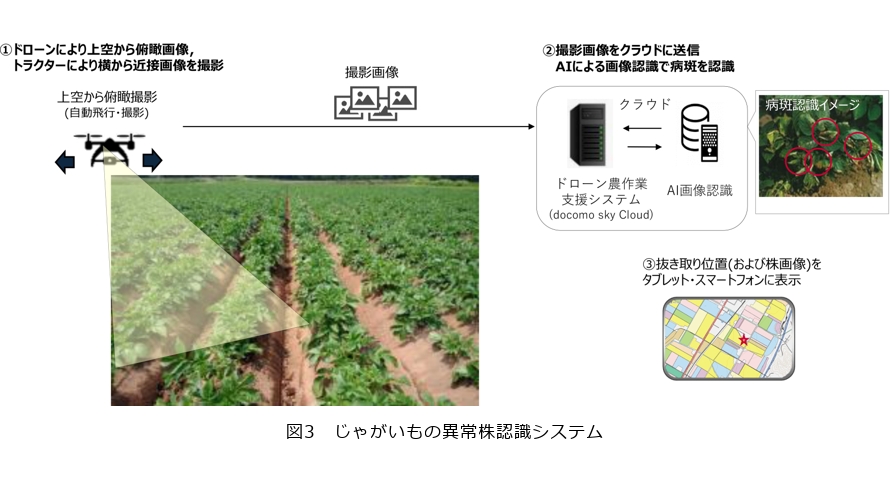
この課題に対し、ドローンとAIを活用したじゃがいもの異常株認識システムを開発し、見回り・発見作業の効率化・自動化を実現します。開発するシステムは対象の圃場に対してドローンによる自動撮影を実施し、その後画像認識AIによる検知を行い、最後に利用者に対して検知結果の通知を行います(図3)。
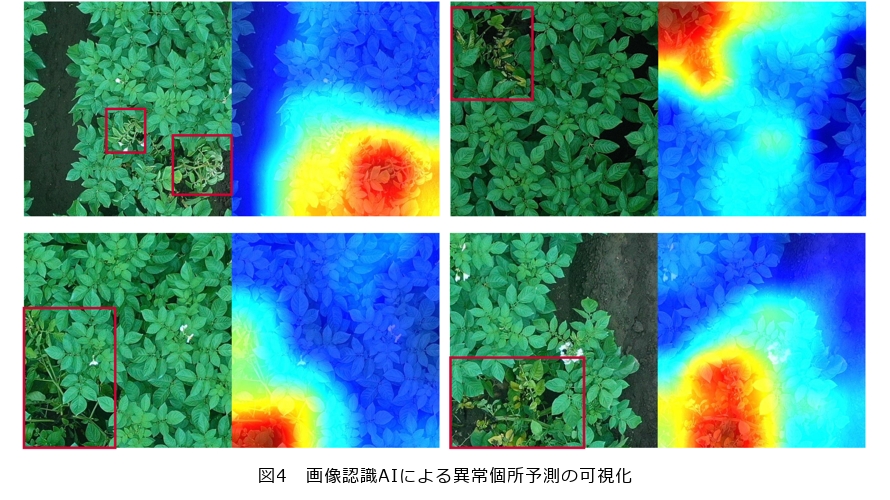
はじめに、ドローンを用いて圃場上空から高精細な画像を自動撮影し、圃場全体の状況を把握します。ドローンによる圃場把握ではドローン自身に備わっている自動飛行と自動撮影機能を活用しており、利用者はドローンの専門知識を必要とせずに実施できます。具体的にはスマホアプリの地図上で撮影したいエリアを設定することで飛行ルートを設定でき、同様にスマホアプリ上で離陸、着陸のボタンを設定することで自動飛行と自動撮影が行えます。次に、撮影された画像をクラウド上のAIシステムに送信しAIによる画像認識を行います。画像認識AIでは葉の萎れ、枯れといった病気の兆候(異常状態)を自動で検出することができます。加えて、AIが画像のどの部分に注目して「異常」と判断したかをヒートマップとして可視化することも可能であり(図4)、人間がAIによる判断根拠を基に最終判断を行う際に役立ちます。開発した画像認識AIでは「異常」を検知できますが、「異常」は品種や農家の育て方、抜く基準によってさまざまな基準があります。加えて、農家自身も感覚的に実施していることが多く、すべての基準をパターン化して言語化できている状況ではありませんでした。そこで私たちは地域農家を代表する熟練者の判断結果を中心に収集と活用を行い、複数の農家や地域の農業協同組合連合会の方にも協力いただきながらヒアリングを繰り返すことでデータセットへ落とし込んでいきました。
続いて、AI検知した異常をユーザへ通知します。ユーザへの通知では異常が検知された株の正確な位置情報(GNSS座標)と該当個所の画像をタブレットやスマートフォン上で確認できます。これにより、作業者は広大な圃場の中から問題のある株へ効率的に誘導され、迅速な抜き取り作業が可能となります。また、検知結果を事前に確認できるため本来は作業できない夜間に確認作業が可能になります。加えて、異常株の様子を含め圃場全体の様子を事前に確認できるため、明らかに異常であるものや病気の進行が進んでいるものを優先的に抜いたり、異常と検知された株がたくさんあるエリアに対して人と時間を多く割いたりと作業計画を立てられるようになります。
実証実験において開発したシステムを実際の農作業へ導入した際の省力化効果の検証を実施しています。開発した画像認識AIの精度は、症状の強さや成長段階によって異なる傾向が見られ、はっきりと症状があらわれている場合や、やや強い症状の場合は比較的容易に検出できます。しかし、症状がまだ弱い段階では、AIが異常として検知できるケースと、見逃してしまうケースがあります。そこで実際の利用ではAIによるスクリーニングと人間の最終確認を組み合わせた運用が必要になります。また、実際の農作業へ導入した際の省力化効果を確認するために開発したシステムを用いて事前に作業計画を立て、作業を実施するシミュレーションを行いました。開発したシステムを利用した際と利用しなかった際のシミュレーション結果を比較すると、人員を約50%削減でき、作業時間は約30%削減できることが確認できています。現在のシミュレーション結果が多くある条件の中の一部を対象として確認したものであるため、今後対象範囲を拡大すべく検討を進めていき課題解決を続けていきます。
生産者の負担軽減をめざすロボット自動化
■開発背景:日本の農業課題
日本の農業は、農業従事者全体に占める65歳以上の割合が70%以上(5)であり従事者の急速な減少と深刻な高齢化という課題に直面しています。これにより、従来人手に頼ってきた作業、とりわけ時間と労力を要する除草作業の維持が困難になりつつあります。一方で、農林水産省が推進する「みどりの食料システム戦略」(6)では、化学農薬や化学肥料の使用量削減、温室効果ガス排出削減など、環境負荷を低減した持続可能な食料生産システムの構築が求められています。特に、無農薬栽培や有機栽培に取り組む圃場では、除草作業が収量や品質を左右する極めて重要な工程でありながら、その負担の大きさから十分な除草管理が難しいケースも少なくない状況にあります。こうした背景から、除草作業の自動化・機械化を特に環境負荷の少ない方法によって実現することが強く求められており、このニーズにこたえるソリューションとして自律走行型の小型除草ロボットを開発しています。
■小型除草ロボットの概要
「農家に頼れる相棒を!」をコンセプトに、農作業を肩代わりする自律走行型の小型除草ロボットの開発を進めています(図5)。本ロボットはホウレンソウや小松菜等、軟弱葉物野菜畑での除草作業自動化をターゲットとしていますが、技術の応用先として水田環境に対応した除草ロボットの開発も行っています。これらのロボットは、ドコモが持つリアルタイム画像認識AIやロボット制御の技術と、農業機械メーカである、みのる産業株式会社が持つ農機具開発のノウハウを組み合わせています。さらに、国立研究開発法人 農業・食品産業技術総合研究機構(農研機構)や各県の農業技術センターとの協業、そして実証実験を行う現地の生産者の協力により、実際の圃場環境での課題に対応しながら開発を進めています。

■小型除草ロボットの技術的特徴
小型除草ロボットは、カメラと画像認識AIで実現する「人間の眼」に相当する部分と精密な走行制御技術を組み合わせることで、数センチメートルという非常に狭い畝の間を、作物を傷つけることなく自律走行し、雑草を取り除くことができるものです。このような動作は以下に示す6つの特徴によって実現されます。さらにはこれらの特徴を1mに満たない小さな機体に実装することで、露地栽培だけでなく施設栽培においても除草作業の自動化が可能となっています。
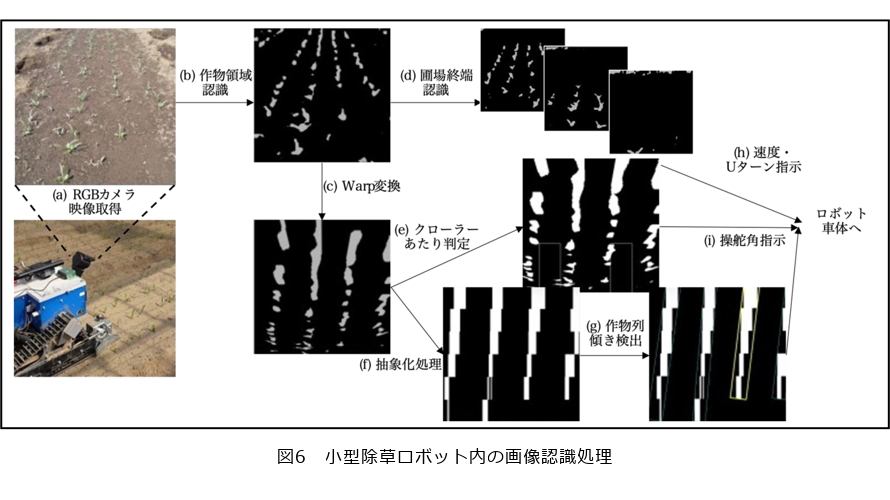
① リアルタイム作物認識AI:小型除草ロボットには画像認識AIが搭載された小型コンピュータが内蔵されており、カメラでとらえた映像をリアルタイムで解析します。具体的には、ピクセル単位で「作物の葉」「地面」「雑草」といった画像内の領域を識別し、作物を正確に認識します。加えて当該AIは、ロボット上で高速に動作するようにチューニングされており、外部のコンピュータやクラウドに頼らず、オフラインの環境下で高速に動作することができます(図6)。
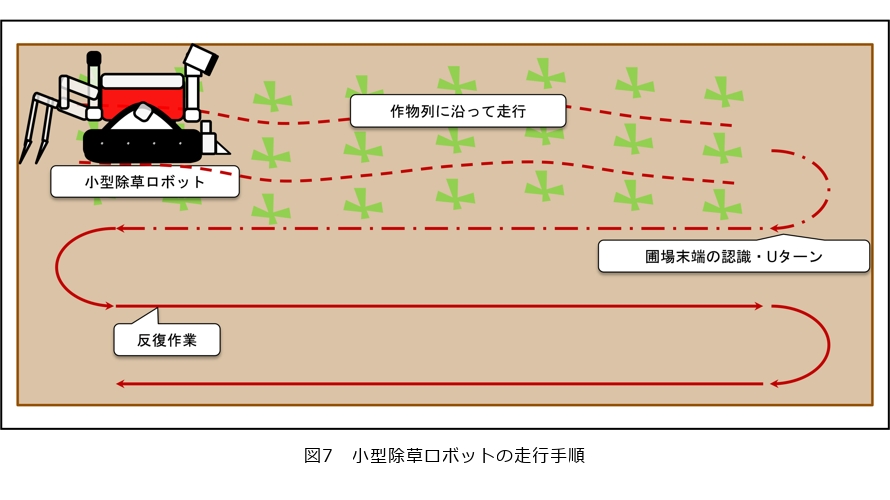
② 作物回避と精密な走行制御:AIの認識結果に基づき、ロボットは「作物の列にぶつからないように」かつ「畝から外れないように」双方の要件を満たすように、自身の動きをミリ単位で精密にコントロールします。作物のわずかな傾きや位置ずれもリアルタイムで検知し回避しながら走行します。また、畑の終端までロボットが到達すると自動でUターンし隣の畝に移り、連続して自動除草作業を行う機能も開発されています(図7)。
③ センチメートル級の高精度測位:ドコモの持つ高精度な位置情報サービス(7)(ネットワーク型RTK-GNSS)を利用することで、ロボットは畑の中での自身の正確な位置を常に把握しています。
④ 物理的な除草機構:ロボットの後部には、土を掻き、雑草を間引く機構が取り付けられており、化学農薬を使わずに物理的に作物列間の雑草の除去に効果を発揮します。また、この除草機構は作付け体系や作物の種類に応じて交換することが可能です。
⑤ ロボット技術基盤(ROS2(8)): ロボットのソフトウェアは、ロボット開発で広く使われている標準的なプラットフォーム上であるROS2上に構築されています。これにより、将来的な機能拡張や他の機器との連携がしやすくなっています。
今後の展開
今後、小型除草ロボットについては実用化し、製品ないしサービスとして提供していきたいと考えています。加えて、小型除草ロボットの開発で培った作物列を画像から認識してリアルタイムに走行制御を行う一連の技術は、他の農業機械へも応用が可能であり、精密な制御が必要とされるロボットトラクター(大型の自律走行型トラクター)への搭載も見据え、検討を進めています。
ドローンセンシングは牧草地の雑草管理やじゃがいもの異常株検知で示されたように、ドローンによる空撮データとAI解析の組合せは、広域な圃場においてピンポイントな栽培管理を実現する手段であると考えており、今後は、対応できる作物や病害虫の種類を増やすなど、AIエンジンのラインアップ拡充を図り、より多様なニーズにこたえられるソリューションをめざしていきたいと考えています。
これらの技術が広く普及するためには、導入コストの問題や、さまざまな環境下での安定動作、操作の簡便性など、まだ解決すべき課題もありますが、NTTドコモは、実際の農業現場での実証・改善を繰り返し、実用的なソリューションとしての社会実装に取り組んでいきます。
■参考文献
(1) https://www.tokachi.pref.hokkaido.lg.jp/fs/2/1/9/0/3/9/5/_/tikusan03.pdf
(2) https://www.docomo.ne.jp/info/notice/hokkaido/page/210811_00.html
(3) https://www.ntt.com/about-us/area-info/article/20230920.html
(4) https://www.hokuren.or.jp/_greenweb_/?post_type=season_booklet_page&p=15322
(5) https://www.maff.go.jp/j/wpaper/w_maff/r3/r3_h/trend/part1/chap1/c1_1_01.html
(6) https://www.maff.go.jp/j/kanbo/kankyo/seisaku/midori/
(7) https://www.ntt.com/business/services/highprecision_gnss_positioning.html
(8) https://docs.ros.org/en/foxy/index.html
(後列左から)北出 卓也/松村 択磨/小圷 勇亮/佐藤 弘之
(前列左から)山谷 佳祐/水野 涼介/中村 圭佑






私たちは農業の現場を大切にし、日々進化していくAIやロボット技術を研究開発しながら、パートナーの皆様と一緒に日本の農業を持続可能なかたちで未来へとつないでいく、そのような挑戦を進めていきます。