2025年10月号
明日のトップランナー
脳の運動制御メカニズムが導き出す新たな遠隔操作ロボット技術の展望

人間の脳はさまざまな指令を出して、何気ない体の動作や運動を行っています。同じ人間であっても利き手と非利き手ではその器用さに差があります。そのような単純な課題点から、脳の運動制御メカニズムを「脳の出す運動指令のタイミングの乱れ」という、今までにない新しい視点で解明し、次々と新たな発見をされている「脳の運動制御メカニズム」のトップランナー、髙木敦士特別研究員にお話を伺いました。
髙木敦士
NTTコミュニケーション科学基礎研究所
特別研究員
PROFILE
2011年インペリアル・カレッジ・ロンドン物理学部卒業。2016年同大学博士号取得(理学)。2017年東京工業大学(現・東京科学大学)特任助教。2020年NTT株式会社入社。脳の情報処理や運動制御メカニズムの解明にかかわる基礎研究に従事。
基礎研究の原点、脳の指令する筋活動の乱れが実際の動作の精度を左右する
■「手足の器用さを定量的に測る技術」について、その経緯や内容を教えてください。
この研究を始めたきっかけは日常生活での何気ないひらめきからです。具体的には、ある日歯磨きをしているときに「なぜ左手では歯磨きができないのだろう」と思いついたのがはじまりです。そのときはコロナ禍でリモート状態だったため、この疑問を検証できる「自宅でできる実験」を考案したことが、この研究のスタートでした。
そこでスマホの加速度センサを利用し、右手(利き手)と左手(非利き手)で円運動をした際のデータを計測、解析をしました。右手(利き手)のほうが器用なのは、はじめから分かっていたのですが、ではこの右手と左手の差はなぜ起こるのか、その本質的な理由は明確ではありませんでした。これまでも、こうした器用さを具体的に予測・説明できるような仮説はいくつか提案されてきましたが、依然として未解明な点が多く残っていました。そこで、実際の動作の精度を決めるのは、筋肉を動かすための指令を脳が出すタイミングの乱れに原因があるのではないかと仮説を立てました。
例えば、お年寄りが思うように体が動かない、つまずきやすくなったなどとよく聞きますが、これも脳が出す運動指令のタイミングが乱れている部分に原因があると考えられます。歩くために足を前に出そうとしてそのタイミングがワンテンポ遅れる、けれども体はすでに前傾している、そしてバランスを崩して転倒、というような事例です。同様のことは小脳疾患の患者にも起こるのですが、この事例でも「脳の運動指令タイミングの乱れ」が発生していることが予想できます。
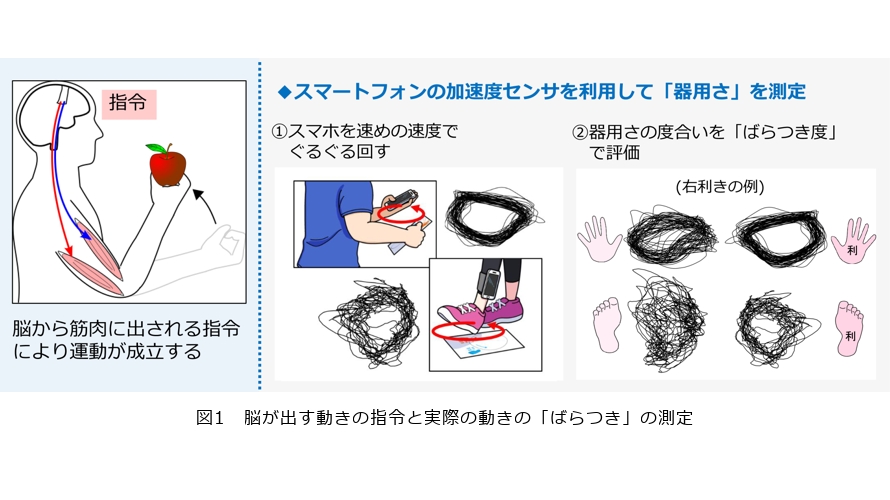
例えば、テーブルの上にあるリンゴを持ち上げるという動作1つでも、脳は腕や手首、指などのさまざまな筋肉に動きの指令を出しています(1)(図1)。それは、運動量やそれぞれの筋肉に発生させる力の強弱など、各筋肉に出す指令の要素は多岐にわたります。この脳が出すさまざまな指令のタイミングのばらつきが実際の動作の精度を左右するといえるのです。
■具体的にはどのような技術研究に取り組まれていますか。
まずは、この動きのばらつきデータを測定するためのスマートフォンアプリの開発を行いました。人間は、学習によって複雑な感覚情報を基に思ったとおりに動くことができるようになります。しかしロボットと異なり、どんなに上達した動きでも「ばらつき」が生じ、完全に正確には動かすことができません。この運動のばらつきは、長年、脳運動研究分野でも注目されてきましたが、手や足を自在に動かす脳の情報処理の仕組みを理解するには、成長やトレーニングによって運動のばらつきがどのように変化するかを調べる必要がありました。そこで私は、定量化が難しかった手や足の「器用さ」をその重要な側面である「運動のばらつき」に注目し、日常生活の中で手軽に実施可能な「スマートフォンを15秒程度ぐるぐる回す」という行為から、簡便かつ短時間で運動のばらつきを「可視化」するアプリを開発しました。
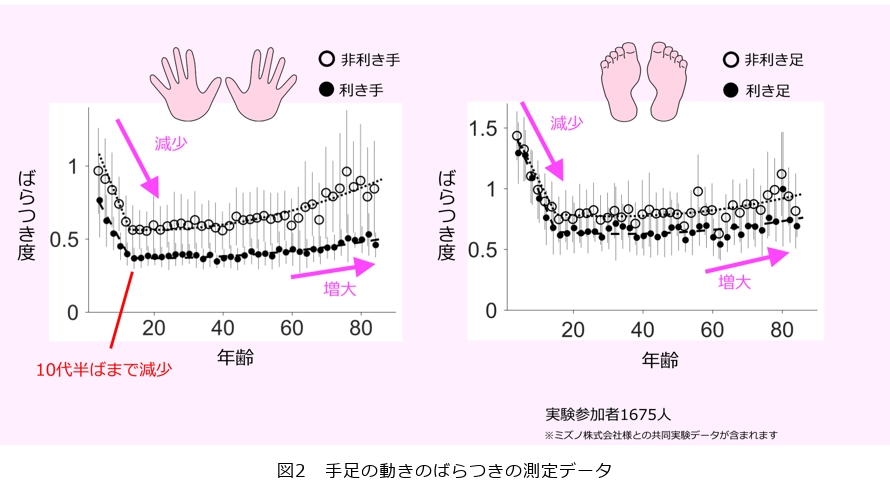
そしてこのアプリを使用して、多くのデータを取得することができました。具体的にはスポーツ用品会社のミズノ株式会社との共同実験で、4歳の幼児から88歳の高齢者まで、1675名の方々のデータを計測しました。この実験はその後も継続しており、現在では2000名以上のデータが集まっています。
図1右側のパネルは、実際に右利きの人で計測した、両手両足の加速度軌道の一例を示しています。左右の軌道を比較すると、手足とも左よりも右が軌道のばらつきが少ないことが分かります。私が開発したアルゴリズムで、周期運動における連続した2周期の3次元加速度軌道の違いを距離尺度で表現し、全周期に対して平均を求めることで、その「ばらつき度」を定量化できます。こうして得られたデータを解析した結果、手足ともに利き側・非利き側で、ばらつき度は成長とともに減少し、その後一定となり、加齢によって増大することが明らかになりました(2)(図2)。また、手足ともに利き側のほうが非利き側よりもばらつき度が小さいことも判明しました。
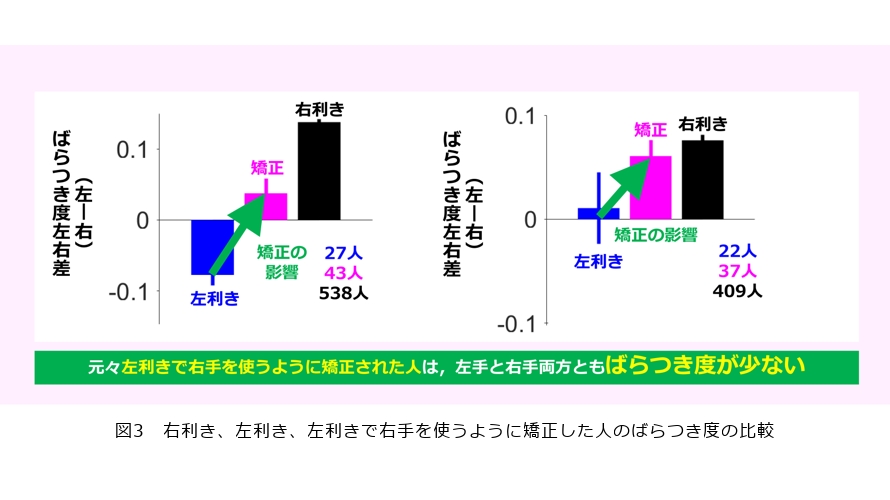
次に、この利き手と非利き手の器用さの違い、ばらつき度の左右差がトレーニングに影響されるかを検証するため、右利き、左利き、右手への矯正者に分けてばらつき度を評価しました(図3)。右利きの人は左手のほうにばらつき度が大きく、左利きの人は右手のほうにばらつき度が大きくなっています。また、元々は左利きで右手を使うように矯正された人は、左手と右手両方ともばらつき度が少ないことが分かります。左から右への矯正トレーニングを受けた場合、右手のばらつき度が減少するだけでなく、左手のばらつき度は増えていないので器用さが低下しないということも明らかになりました。
現在は次の段階として、リハビリ施設を運用する企業と協同し、本アプリを使って運動疾患を伴う患者のデータ取得に関するプロジェクトを進行中です。例えば、脳卒中で運動能力の落ちた患者さんのデータを計測し、何週間かのリハビリ後のデータと比較することで、回復状態を検証するといった計画です。基本的にリハビリは単純動作の繰り返しになるので、ある程度回復するとどうしても怠けがちになってしまいます。このアプリで回復効果が可視化できれば、それぞれの患者さんにとっても治療に向けた良いモチベーションになるのではないかと考えています。
ほかにも、このアプリで自分の器用さを測定したり、図2のようなデータと照合することで、同年代の方の平均的な器用さと比較できますし、例えばトップアスリートが自分のフォームを改良するときに、新しいフォームの安定度や習熟度を測るなどという使用法も考えられます。
■研究で苦労された点や今後の課題点を教えてください。
私の研究は、従来の脳科学の教科書に掲載されている理論とは異なる「脳の運動指令のタイミングが乱れる」という新しい仮説に基づくものです。そのため、周囲からの理解や協力を得るのに苦心しています。ただ、この仮説のおかげでこれまでにない発見も次々と生まれており、その影響で研究の可能性も広がり、脳の運動制御の理解がますます深まっています。現在開発中の遠隔操作式のロボットアームも、脳の運動制御を深く理解することから生まれた技術です。このロボットアームに関する私の研究は、ロボットのハードウェアではなく、動作プログラム(アルゴリズム)に関するものになります。この技術は従来のシステムでは難しかった、「高い追従性と、自然な動作の柔らかさ」を兼ね備えた画期的なものであり、遠隔医療や介護の未来を切り拓く可能性を秘めたものです。
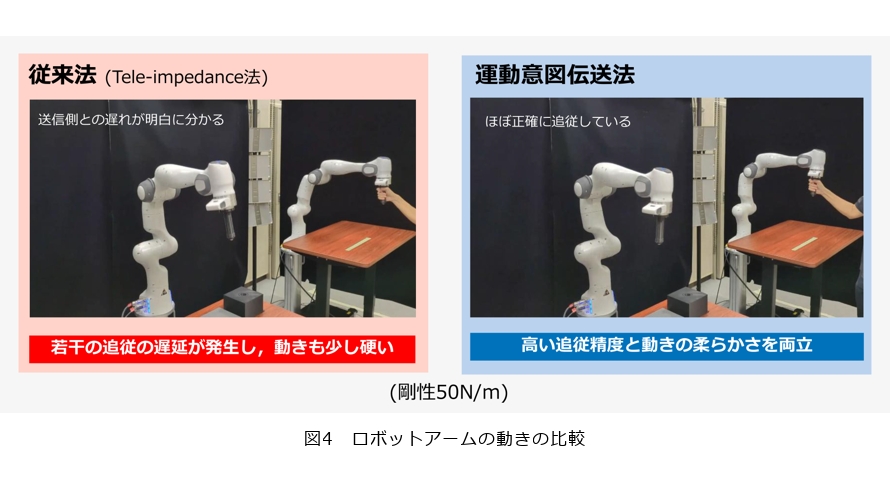
従来法(Tele-impedance法)のロボット操作では、通信を介さない状態であれば人間の動作を正確にトレースして動くことができますが、遠隔操作で通信を介する状態では通信遅延が発生し、動作の追従精度と動きの柔らかさを両立することができませんでした。動作精度を追求すると柔らかさが失われ、柔らかさを求めると精度が落ちてしまいます。そこで、私が開発した動作プログラム「運動意図伝送法」では、操作者の現在の動きから運動意図を推測し、その推測に基づいて遠隔操作ロボットを動かすことで、精度と柔らかさを両立することが可能になります(3)(図4)。ただ、この「高追従低剛性制御」の遠隔操作ロボットの能力でも、私としては十分ではありません。今後の課題として、「触覚」フィードバックの実現が残されており、現在研究を進捗中です。
また、実用化の観点においては、さらなる課題も抱えています。現状では送信側のアームと受信側のアームの大きさなどが同型であることが必須です。例えば、各医療現場や介護施設などで使用される設備が、同型・同一機種でない場合は対応が難しいということです。同一規格の同一機種を各地に敷設するというのは現実的ではありませんから、これは実用化にあたって機械が小型化することなども念頭に置くと、さらに実証実験で検証しクリアしなければならない大きな課題です。
このように私の研究は、発展例としてさまざまな展開や可能性があるため、限られた時間内でどの部分に焦点を当てるべきか、今後の進め方を検討していく必要があるかという点も、今後の課題の1つといえます。幸い私は大学の助教としての経験もありますから、将来は有望な後進社員を育てて、すべての発展例や可能性をグループとして実現していくという方向性も考えています。
医療や介護への貢献と品質の向上で未来を切り拓く
■今後の研究の展望やNTT事業とのかかわりについて教えてください。
私の専門は、脳の運動制御理解という基礎研究になりますが、社会応用という観点から大きく2つの実用化を目標にしています。1つは前述した「手足の器用さを計測するスマートフォンアプリ」です。こちらは、他社リハビリ施設との共同実験が進行中であり、2025年度内には何らかの成果を生み出す見込みです。例えば、リハビリの業界で一般的に用いられてきた医療指標と、本アプリで計測する手足の器用さとの相関解析などは、興味深い結果になると思われます。一方、患者さんにとってもっとも重要な側面は、リハビリによる機能回復です。これは年単位での経過を観察する必要があるため、長い期間での継続的な取り組みが必要になるでしょう。
もう1つの目標は、新しい遠隔操作ロボット技術の実用化です。人の動作や運動の意図を推測して、高い追従性と自然な動きの柔らかさを両立させ、この2つの性質を兼ね備えたロボットの動作プログラムが実用化されれば、遠隔医療や遠隔リハビリ、介護などの発展に大きく寄与する可能性があります。例えば、事故などで時間を争うような緊急かつ専門的な手術が必要な場合、これまではヘリコプターで緊急搬送などの手段が高じられてきましたが、医療設備とこのロボットアームの設備さえあれば、事故現場近くの医院でも高度な専門医の施術が受けられるようになるはずです。これは1分1秒を争うような場合には大変な利点となる医療技術です。また、限定的な使用法になると思いますが、原子力発電所の中核施設や宇宙空間での船外活動などといった、人が立ち入ることのできない危険環境での作業でも活躍が期待できます。
現在、私が開発している遠隔操作ロボットにおいては、低遅延で安定した通信を実現するNTTのIOWN(Innovative Optical and Wireless Network)構想の基盤は極めて重要な要素となります。送信側と受信側の距離が離れていれば、通信の遅延が起こるのは当然のことで、その遅延が数10ミリ毎秒のレベルで安定していることが、遠隔操作においては不可欠となります。この値が変動すると、それだけでロボットの動きがぎこちないものになってしまい、変動する通信遅延に対応して新たなプログラムが必要になるので動作プログラム自体に余計な負荷がかかります。IOWNによって安定した低遅延通信が確立され、最小限のプログラムで安定して動作するようになれば、遠隔操作技術の応用範囲は飛躍的に広がってその能力を最大限に発揮できるようになります。
■入社された経緯や所属されているNTTコミュニケーション科学基礎研究所について教えてください。
私がインペリアル・カレッジ・ロンドン在学中に、NTTの上席特別研究員の方がロンドンの研究室に訪れたことがありました。当時、私は「人と人の触覚ベースの相互作用のメカニズム」について研究していたのですが、その方の研究内容との共通点があったため結構深い議論になり、そのときにNTTの基礎研究の内容について初めて詳細を知ったのです。
私は2016年に博士号を取って大学を卒業してから、翌年2017年には帰国して東京工業大学(現・東京科学大学)の特任助教として勤め始めました。学会などでも、また別のNTTのフェローや研究員の方にお会いして懇意にさせていただくようになり、NTTコミュニケーション科学基礎研究所の環境の素晴らしさを教えていただきました。その方々の薦めもあって、2020年にNTTに入社しました。今になって振り返れば、こうしたNTTの研究者の方々にお会いしたことが私の人生の大きな分岐点になったのではと感じています。
現在、私が所属するNTTコミュニケーション科学基礎研究所は「人にやさしいヒューマノイドコンピュータをめざして、人間の知識や感性に関する情報処理やメディア処理など情報通信に関する新しい知見や概念の創出をめざす」という理念のもと、さまざまな基礎研究に勤しんでいます。あらゆる角度から未知の知見を掘り起こし、それによって新たな未来の可能性を切り拓くことを目標にしています。自由な発想が何よりも重視される環境で、幅広いジャンルの基礎研究者が多数在籍しています。現在の私は、リモート勤務を中心としながら、他社・大学・リハビリ施設などに頻繁に足を運び、多用なデータ計測に汗を流しています。研究テーマの選定や働き方を含めて、本当に自由な研究環境で私自身ものびのびと研究ができ、個性あふれる素晴らしい研究者たちと共に働けることを大変楽しく感じています。
■研究者・学生・ビジネスパートナーの方々に向けてメッセージをお願いします。
研究のアイデアは、多くの場合「自由な発想」から生まれます。私の場合、趣味であるテレビ番組や読書から思いがけないヒントを得ることもあります。常にアンテナを張り、新しい視点で問題をとらえ直し、アイデアを生み出せるよう心掛けています。
また、多種多様な方々とのコミュニケーションの中で生まれてくるアイデアもあります。違う業種の方々と話すことで、同じアイデアでも異なるアプローチがあったりします。私のスマートフォンアプリでも、医療やリハビリだけでなく、そういったコミュニケーションの中からトップアスリートのフォームの改善や安定化の指標として使用するなどのアイデアが生まれたりもしました。
最後に、これから研究職に就きたいと考えている学生諸君に伝えたいことは、英語がとても大事だということです。英語は研究発表や国際会議、論文読解に欠かせません。翻訳だけではなく、議論やプレゼンテーション、メールといった実践的なコミュニケーション力を身につけることも重要です。文法が完璧でなくても構いませんから、自分の意図を相手に伝えることが最優先です。可能であれば海外に滞在し、現地で英語を使う経験を積むことをお薦めします。私もその経験のおかげで、海外の研究者との共同研究をスムーズに進めることができましたし、これまで国内外の大学や企業と連携して単独では成し得なかった成果を積み重ねてくることができました。今後も多様なパートナーと協力し、実社会で役立つ研究を推進したいと考えています。

■参考文献
(1) A. Takagi and H. Gomi: “A model of motor timing volatility and its effect on force variability,” IJCNN 2024, pp. 1-5, Yokohama, Japan, June-July 2024.
(2) A. Takagi, N. Tabuchi, W. Ishido, C. Kamimukai, and H. Gomi: “A novel assessment reveals motor variability as a sensitive marker of neurological development, decline and plasticity,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 33, pp. 2597-2605, 2025.
(3) A. Takagi, Y. Li, and E. Burdet: “Flexible assimilation of human's target for versatile human-robot physical interaction,” IEEE Transactions on Haptics, Vol.14, No.2, pp.421-431, 2020.