2022年5月号
特集
実証実験の取り組みと成果─基盤関連
- コネクティッドカー
- IoT
- ビッグデータ
NTTグループとトヨタ自動車はコネクティッドカー向けICT基盤の研究開発に関する協業において、2018年から2020年にかけて共同実証実験を実施し、さまざまなユースケースおよび基盤検証を通じて、基盤技術を確立しました。本稿では、車載機からCAN(車両制御)データ、画像データ等を収集・蓄積、活用するためのコネクティッドカープラットフォーム全体のリファレンスアーキテクチャ、およびその実装と実証実験を通じて抽出した技術成果・課題の概略を紹介します。
千葉 祐(ちば ゆう)
NTTデータ
コネクティッドカーの特徴とその技術課題
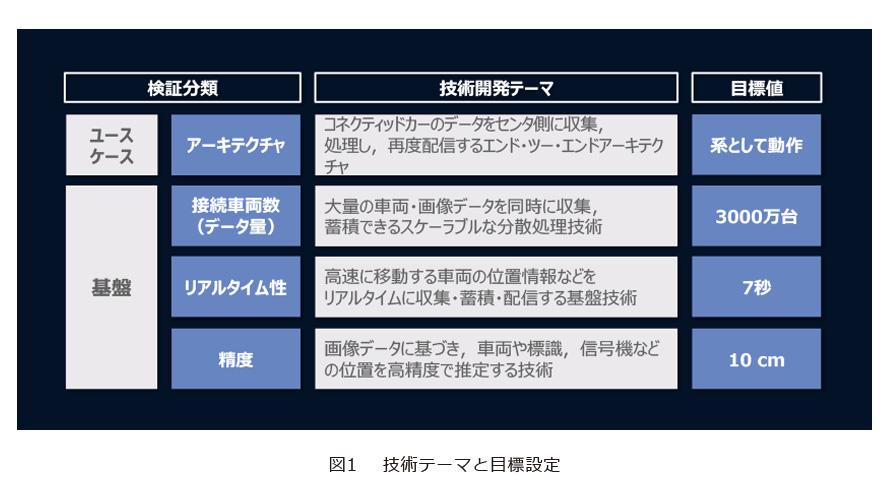
コネクティッドカーから得られるCANデータ、センサデータ、画像データなど各種データの量は、コネクティッドカーの台数の急速な増大に合わせて膨大なものとなっており、それらデータを効率的に、かつ高速に処理することが大規模コネクティッドカープラットフォームの将来的な活用に対しての大きな技術課題となっています。加えて、コネクティッドカーが独自の特徴である「モバイル網を使った通信が必要であること」「高速に移動するデバイスであること」「車のライフサイクルが長いこと」「扱うデータ量が1日の中でも時間によって大きく変動すること」などにより、大規模コネクティッドカーデータをさまざまなユースケースで活用するためには、複雑かつ多くの技術課題が存在します。本検証では、その中でも、特に重要な要素技術となる、大規模データ量処理、大量データのリアルタイム処理、データ処理の精度の3つの視点で達成目標を設定し、コネクティッドカーや自動運転技術に期待されるさまざまなユースケースを実現するコネクティッドカープラットフォームの実現に取り組みました(図1)。詳細につきましては後述します。
実証実験でのターゲットユースケース
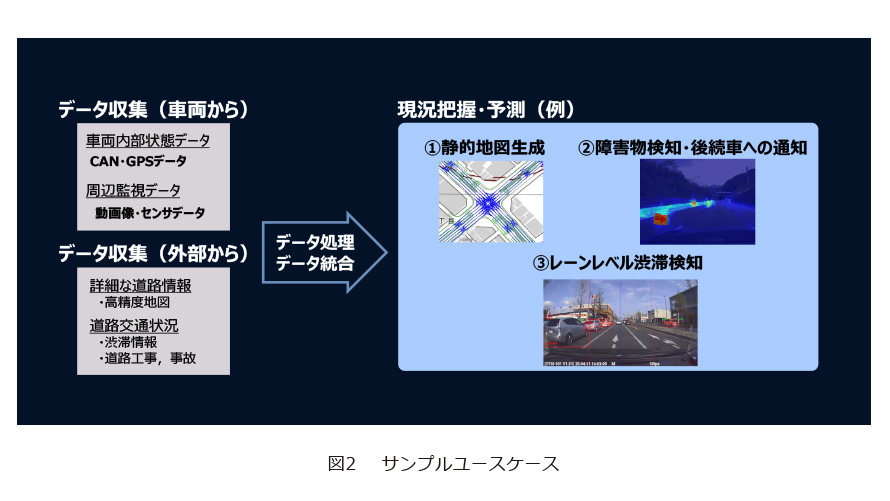
本取り組みでは、2018年から2020年までの3年間、試験車両を活用した公道の実証実験を実施しています。主な目的は将来的に数100万台のコネクティッドカーがつながる大規模プラットフォームの技術確立と性能評価にあります。それらを評価するための実際に実現が期待される3つのユースケースをサンプルに技術検証を実施しました(図2)。
① 静的地図生成:コネクティッドカーから収集した車両の位置データ、動画データを、センタ側で分析し、自動運転技術等に必要とされる高精度な静的地図を生成
② 障害物検知・後続車への通知:コネクティッドカーの車載カメラの画像データを活用し、車道に存在する落石などの危険な障害物を検知、センタ側で管理し、後続車両に通知
③ レーンレベル渋滞検知:CANデータの統計情報を活用、および動画データのリアルタイム活用により、定常渋滞と突発渋滞を検知して、突発渋滞の先頭地点の画像を分析することで渋滞原因を特定
本検証では、これら3つのユースケースの実現性を、実証実験をとおして評価するとともに、大規模コネクティッドプラットフォームに必要な要素技術の中で、特に目標設定したデータ処理量、リアルタイム性、精度の3つの視点で検証・評価を実施しました。
コネクティッドプラットフォームのリファレンスアーキテクチャ
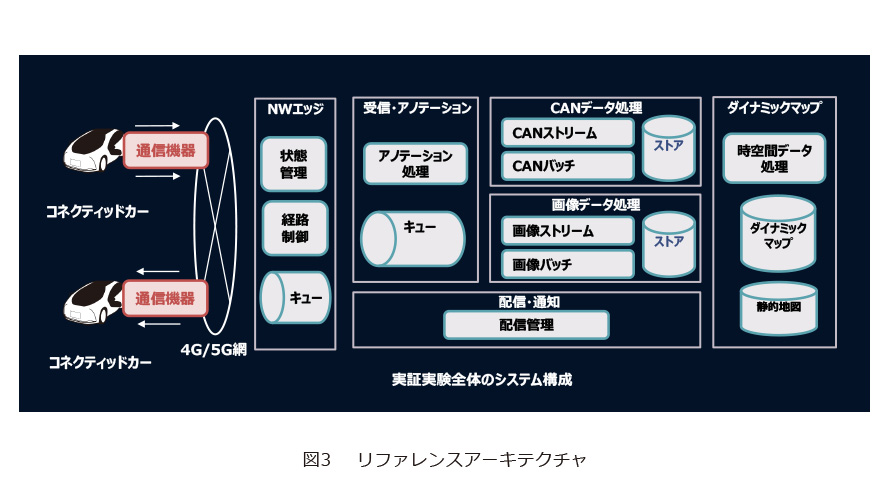
コネクティッドカーから無線網〔4G(第4世代移動通信システム)/5G(第5世代移動通信システム)網〕を介してデータ処理用のサーバを集約するセンタにデータを収集・蓄積し、それらデータを分析、必要なデータを再度コネクティッドカーに送信するというエンド・ツー・エンドでのシステムアーキテクチャをリファレンスモデルの確立に取り組みました。本リファレンスアーキテクチャは、コネクティッドカーとつながる「ネットワークエッジ基盤」、そこからデータを受信する「受信・アノテーション基盤」、データ処理を行う「CANデータ処理基盤」と「画像データ処理基盤」、データ管理を行う「ダイナミックマップ基盤」、そして、センタから、コネクティッドカー側への通信を管理する「配信・通知基盤」の処理ブロックで構成しています。
それぞれの基盤の実装では、すでにグローバルマーケットでデファクトスタンダードとなっている、オープンソースのソフトウェアを活用しています。本協業では、特定企業のソフトウェアに依存することなく、よりオープンな技術を中心にして技術確立するという方針で活動しており、技術の標準化につながる技術開発を目標としています。そのため、これらのソフトウェアは、今後の技術の進歩や、技術革新によって、見直しができるような構成としています(図3)。
ユースケース検証の実施概要
前述のリファレンスアーキテクチャに基づき実装した実証実験用のサーバ環境をセンタ側で構築し、試験車両を活用して3つのユースケースの実現性検証を実施しました。
(1) 静的地図生成
本ユースケース検証では、まずセンタ側にいるオペレータが地図生成の指示を出します(図4①)。対象エリア(②)を走行中のコネクティッドカーに通知が届く(③)とCANデータ、および画像データがセンタに送信されます(④)。センタ側では、これらデータを活用し、画像からの地図化の処理(⑤)、画像から信号機などの地物の位置を推定(⑥)、地図データを作成し、地図データベースに登録するまでの処理(⑦)をすべて検証しました。
(2) 障害物検知・後続車への通知
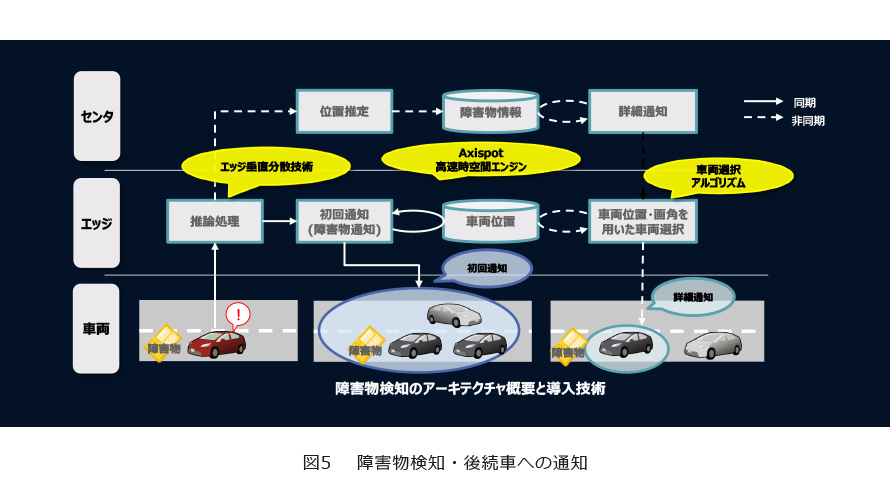
本ユースケース検証では、車載カメラの画像と、障害物の学習済みのデータから、画像に映る地物の推論を行います。地物が障害物だった場合は、障害物の位置推定を行い、結果をダイナミックマップデータベースに登録します。このユースケースでの課題は、リアルタイム性です。本ユースケースの実用化を見据え、障害物を検知し、後続の車両に通知するまで7秒で実現しなければなりません。そこで本検証では、リアルタイム性を高めるため、処理の一部をネットワークエッジにオフロードするアーキテクチャを採用しリアルタイム性を大きく、改善させました。加えて、後続車への危険通知を2段階通知として、1回目の通知は、対象エリアを詳細には絞らず広く通知することで高速性を高め、2回目の通知では、レーンレベルで危険な車両を特定したうえで通知するという方式を導入し、初回通知の高速性を改善させました(図5)。
(3) レーンレベル渋滞検知
本ユースケース検証では、3つのSTEPで渋滞原因の特定を行いました。STEP1では走行中の車両のCANデータをリアルタイム分析し、渋滞の候補となる地点の絞り込みを実施します。メッシュ単位、レーン単位での車両密度を活用して絞り込みを実施しますが、この際、定常的に発生する渋滞については除外しています。これは、定常的に発生する渋滞については事前に原因が推察可能であり、本検証では突発的に発生する渋滞の原因を特定することに焦点を当てているためです。STEP2では、STEP1で絞り込んだ渋滞候補レーンの周辺を走る車両から車両の走行画像を収集し、この画像データを用いて、渋滞の発生有無と、渋滞の発生地点、“渋滞の先頭地点”を算出し、その原因の特定を行います。そして、STEP3で対象となるレーンを走行中の車両に対して、STEP2で得られた渋滞原因に関する情報を通知します(図6)。


基盤検証の実施概要
基盤検証では、リファレンスアーキテクチャを基に実装した5つの処理ブロックごとに技術検証を行いました。
(1) 受信アノテーション
受信アノテーション基盤の評価では、CANデータ、および画像データ処理における性能限界の評価として、500万台の車両が、送信間隔10秒未満、最小1秒間隔でデータを送信した場合の、アノテーション処理、キューイング処理の負荷性能、ボトルネックの見極めを実施しました。
(2) CANデータ処理
CANデータ処理基盤の評価では、リアルタイム性と、スループットの2つの視点での評価を実施しました。リアルタイム性の高い処理、例えば定常的な車両の位置情報の格納処理についてはCANストリーム処理として実装して、レスポンスタイムの限界性能を評価しています。
(3) 画像データ処理
画像データ処理基盤の評価では、リアルタイム性とスループットの視点で評価しています。障害物検知のような高速な画像処理が求められるケースは画像ストリーム処理として実装し、限界レスポンスの評価を行いました。
(4) 配信・通知処理
配信・通知基盤の検証では、各ユースケースにおけるボトルネックとなり得る画像収集コストに注視した検証を実施しています。画像データ収集時におけるトラフィック削減として、NTTの保有する「車両データ選択的収集アルゴリズム」を活用していますが、収集データの絞り込みを行った際の性能評価を実施しています。
なお、ネットワークエッジ基盤については、本特集記事『実証実験の取り組みと成果─ネットワークエッジ基盤』(1)にて説明します。
抽出課題と今後の取り組み
本検証では、リファレンスアーキテクチャの検証をするため3つのサンプルユースケースついて、公道での試験車走行を通じて技術検証を行いました。特にプラットフォーム技術の視点では、データ量、リアルタイム性、精度の3つの視点で目標設置をし、2つを達成できました(図7)。データ量としては、シミュレーションデータを活用し、3000万台規模のデータ処理基盤の検証に成功しました。リアルタイム性としては、ネットワークエッジ技術を活用し、障害物検知のユースケースにて平均通知時間5秒(目標7秒以内)を達成しました。ただし、精度については、V-SLAM(Visual - Simultaneous Localization and Mapping)*や、ランドマークの位置情報の活用、IMU(Inertial Measurement Unit:慣性計測装置)等を用い、精度向上に取り組みましたが、依然、目標とした10cm精度を達成することはできておらず、今後の技術開発への継続課題となります。
本検証では、精度の視点を除き当初の目標を達成することができましたが、それと同時に多くの技術課題を抽出することができました。特に動画データを含めた大量のデータの収集・蓄積・活用には、ネットワークやサーバリソースに大きな負荷がかかります。今後、これらの技術が社会実装されるためには、機能面での実現性だけではなく、より効率的に低コストで実現する技術が必要となるため、本協業においてもすでに進めているエッジコンピューティングの活用による処理の分散化や、リソースの効率仕様などの技術開発も継続して行っています。また、これら技術の利用用途においても、現在、自動車産業に期待される低炭素社会の実現への貢献など社会課題解決につながるケースへ拡充して検討を継続していきます。
* V-SLAM:周囲の三次元情報から自己位置推定と環境地図作成を同時に行う技術。

千葉 祐





自動車産業は日本における重要産業であり、トヨタ自動車と一緒にコネクティッドカー社会の実現に向けた共同研究を進めることは大きなモチベーションとなっています。