2023年6月号
特集
完全遠隔無線制御型水中ドローンを実現する海中音響通信技術
- 超カバレッジ拡張
- 海中音響通信
- 水中ドローン
6G(第6世代移動通信システム)では、空・海・宇宙のような、これまで移動通信システムとして未踏であった領域への超カバレッジ拡張が期待されています。海中における超カバレッジ拡張を実現するため、NTT未来ねっと研究所では安定した長距離通信が可能な音響通信に着目し、高速化・長距離化・安定化に取り組んでいます。本稿では、NTT未来ねっと研究所の海中音響通信技術や、本技術により実現した世界初の完全遠隔無線制御型水中ドローンについて紹介します。
奥村 亮太(おくむら りょうた)/福本 浩之(ふくもと ひろゆき)
藤野 洋輔(ふじの ようすけ)/大森 誓治(おおもり せいじ)
伊藤 勇弥(いとう ゆうや)
NTT未来ねっと研究所
超カバレッジ拡張における海中無線通信のニーズ
2030年代の実現をめざして研究開発が進む6G(第6世代移動通信システム)では、陸上における移動通信システムの高度化のみならず、これまで移動通信システムとして未踏領域であった空・海・宇宙も含めた通信エリアを展開する、超カバレッジ拡張の実現が期待されています(1)。中でも海中は、海底資源開発や港湾設備工事といった産業分野において通信を利活用した効率化が望まれる一方で、これまで無線通信の利用が難しい領域でした。
陸上無線では電波が広く利用されていますが、海中では減衰が大きく、陸上と同様の使い方をすることができません。低い周波数の電磁波を使用する低周波電磁界通信が実用化されているものの、その伝送距離や伝送速度は極めて限られたものです。そこで、海中でも有効な無線通信の方法として、音波や可視光を利用した通信を挙げることができます。音波を利用した音響通信は、電磁界通信と比較して高い周波数帯を利用可能かつ長距離伝送が可能です。しかし、利用可能な周波数幅は陸上無線と比較すると大幅に狭く、実用化されている音響通信技術の通信速度は数10kbit/sと、センサデータ伝送等での利用に限られる性能です。一方で、可視光を使用する光無線通信は利用可能な周波数幅が広いため、音響通信と比較して高速通信が可能です。しかし、海水の濁りや太陽光による干渉の影響を受けるため、高速伝送可能な通信距離が限られるという問題があります。
このように、海中では自由度の高い無線通信利用が困難なことから、資源探査に用いられる無人探査船や港湾工事で使用される海中重機等は、海上の支援船と有線のケーブルにより接続し、遠隔制御が行われています。ケーブルの巻き上げ等の作業のため設備や人員のコストが必要となるほか、ケーブルが潮流で流されるため、作業の効率性や安全性にも課題があります。近年では、より手軽に扱うことができる小型な水中ドローンも登場し、港湾設備や漁業設備の点検といった場面で、これまでダイバーが担っていた作業を代替する取り組みも進められています。しかし、こちらもケーブルの取り扱いが必要であり、作業の省力化や自律化の妨げになっています。
以上のように、海中における有線通信が柔軟な機器利用の妨げになっており、また水中ドローンといったような海中機器類の市場の広がりとともに、ケーブルを取り払いつつリアルタイムに精細な映像の伝送を実現可能なMbit/sクラスの無線通信技術への強いニーズが顕在化しています。NTT未来ねっと研究所では、利用環境への依存が小さく安定して長距離通信が可能な音響通信に着目し、海中への超カバレッジ拡張を実現するため、海中音響通信技術の高速化・長距離化・安定化に取り組んでいます(2)。
海中音響通信技術
海中音響通信は海中特有の環境や音波の性質により、高速・安定伝送が難しいという特徴があります。特に高速化を妨げる要因となるのが、音波が海面や海底、あるいは岸壁等により反射することで生じる、遅延波による問題です。海中で送信された音波は、直接波としてだけでなく、さまざまな経路を経た遅延波としても受信機に到来し、それらが合成された受信信号には波形歪みが発生します。そのような受信信号を復調し通信を成立させるためには、波形歪みを推定し、逆特性により補償する必要があります。海中音響通信では、音波の伝搬速度が約1500m/sと陸上無線と比べて20万倍低速なため、経路ごとに大きく異なった伝搬遅延となり、また海面や通信装置を搭載した船舶が揺らぐため、それぞれの経路で異なったドップラーシフト*1を受けることから、伝搬路が高速かつ複雑な変動をみせます。そのため、陸上無線で用いられている歪み補償技術では、この伝搬路変動に追従することができません。
また、音響通信の安定性を損なう要因として、環境雑音の影響が挙げられます。環境雑音の中でも海洋生物が発する雑音の影響が大きく、特に問題となるのが、日本のみならず世界中の浅い海域に広く生息しているテッポウエビが発する雑音です。テッポウエビは威嚇などのため、頻繁にはさみを鳴らして破裂音を出しおり、海中ではパチパチと、テンプラノイズと呼ばれる音が聞こえるほどです。この大音量かつ頻繁な音が音響通信信号に重畳されて受信されると、音響通信の安定性を阻害してしまいます。
これらの課題に対してNTT未来ねっと研究所では、高速化を実現する時空間等化技術(3)や、安定化を実現する環境雑音耐性向上技術(4)などを考案しています(図1)。時空間等化技術では、海面反射等による遅延波を除去し直接波のみを抽出することで、伝搬路が一定となる期間を長くし、伝搬路の推定・補償性能を向上し、高速化を可能にします。遅延波の除去は、複数のアンテナで受信した信号を使用し、フィルタ処理によって遅延波の到来方向にヌル(指向性の落ち込み)を形成する、すなわち空間的に遅延波を抑圧することで実現します。環境雑音耐性向上技術では、テッポウエビなどによる大音量の雑音が瞬間的に重畳されることを考慮して時空間等化制御や誤り訂正を行うことで、雑音環境下でも安定した伝送を可能にします。
時空間等化技術および環境雑音耐性向上技術等により、Mbit/sクラスの海中音響通信が実現できることを実海域実験により検証しています。例として、時空間等化技術とMIMO(Multi-Input Multi-Output)*2伝送を組み合わせることで、距離18mで5Mbit/sなどの高速伝送に成功しています(3)(5)。さらに環境雑音耐性向上技術とマルチキャリア帯域分割送信技術*3(2)(4)を取り入れることで、距離300mにおいて1Mbit/s以上となる伝送の実現可能性を確認しています(6)。通信性能がMbit/sクラスまで向上すると、SD画質(640×480px、30fps)のストリーミング伝送トラフィックを収容することができます。海中の精細な映像の伝送を実現できることから、既存の音響通信技術と比較して、ユースケースを大幅に広げることができる性能値であるといえます。
*1 ドップラーシフト:音や光のような波の発生源と観測者の間で相対的な速度差がある場合に、実際の周波数とは異なる周波数が観測される現象。
*2 MIMO:送信、受信のそれぞれで複数の素子を使用することで、無線通信の容量を拡張し周波数帯域の利用効率を向上する技術。
*3 マルチキャリア帯域分割送信技術:異なる共振周波数を持つ送波器を使用し、それぞれで高効率な送信が可能となる帯域の信号を並列に伝送することで、広帯域にわたる信号を送信する技術。

完全遠隔無線制御型水中ドローン
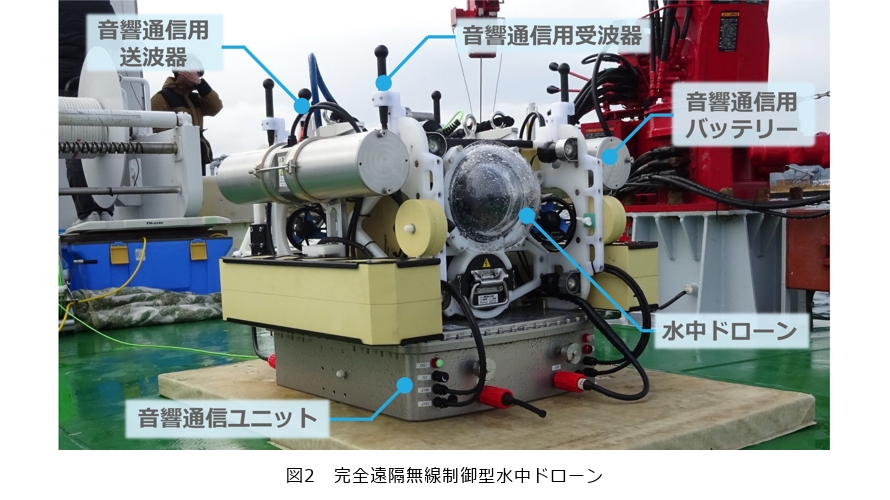
Mbit/sクラスの高速通信が可能な音響通信技術により開拓されるユースケースの1つとして、完全無線により遠隔制御可能な水中ドローンを考えることができます。そこで、NTT未来ねっと研究所の音響通信技術を搭載した音響通信装置を水中ドローンに適用し、世界初となる、完全遠隔無線制御型水中ドローン(無線型水中ドローン)を実現しました(6)(7)。開発した無線型水中ドローンを図2に示します。水中ドローン本体の下部には、音響通信装置やアンプ類を水密筐体に格納した音響通信ユニットが接続されます。また、ドローンの上部には音響信号の送信に使用する送波器が4素子、受信に使用する受波器が4素子取り付けられています。その他、音響通信ユニットに電源供給するバッテリーや浮力調整用の浮力材が水中ドローン本体の周囲に配置されています。音響通信によりケーブルがない状態でも遠隔操作や映像伝送が可能であり、海中で2時間以上連続動作することができます。
無線型水中ドローンのフィールド実証実験
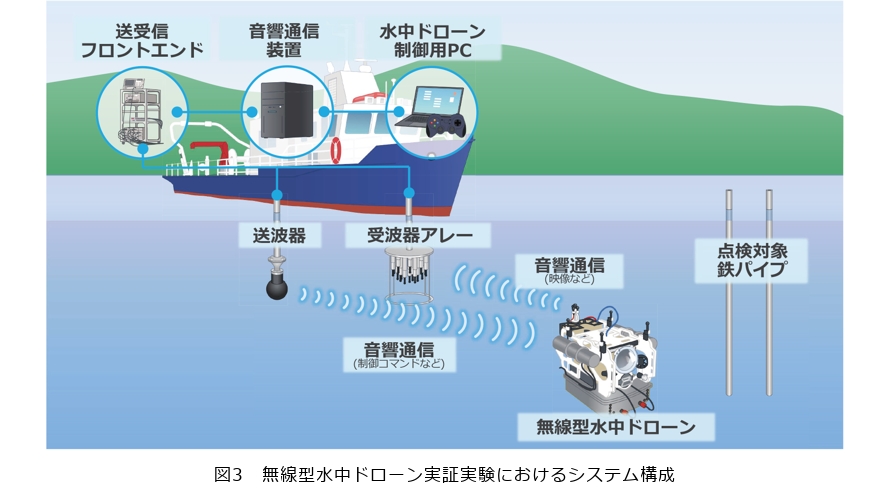
海中設備点検を想定し、実践的な港湾環境において無線型水中ドローンの有効性を実証する目的で、静岡市の清水港周辺海域に展開される海洋実証フィールドにて実証実験を行いました(7)。図3に実証実験のシステム構成を、図4に実証実験の様子を示します。設備点検の対象と見立てた鉄パイプを実証フィールドに設置し、またフィールドに係留された船舶上に水中ドローンの遠隔無線制御に必要な装置類を設置したコントロールセンタを設けました。ケーブルを気にすることなく操作可能な無線型水中ドローンの特徴を活かし、コントロールセンタから、映像を見ながら無線型水中ドローンを無線により操縦することが可能であるかの検証を行いました。
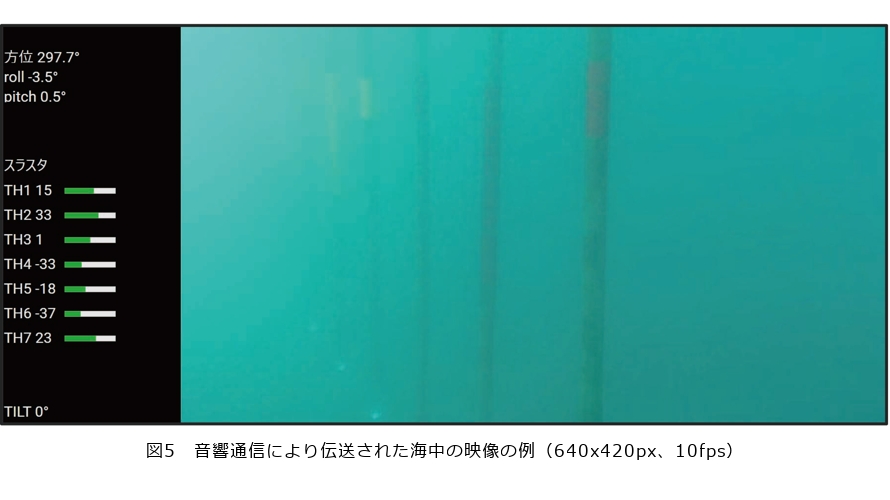
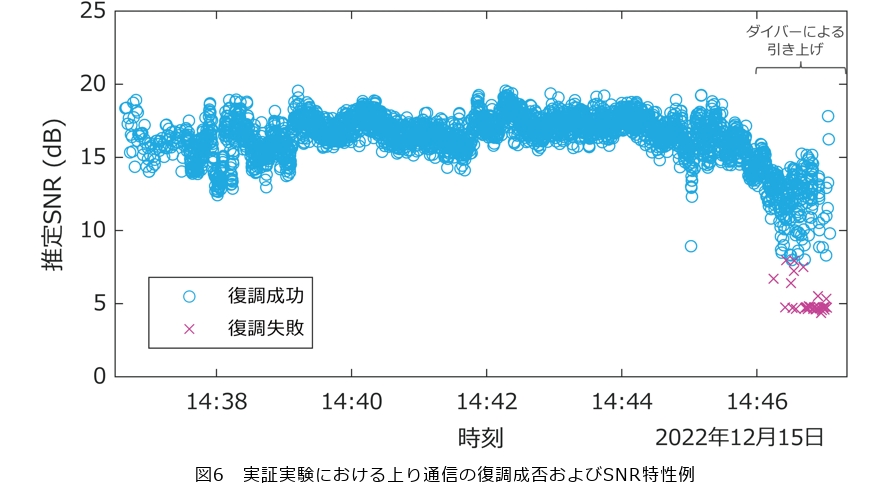
水中ドローンの遠隔無線制御では、双方向で音響通信を行います。水中ドローンから船舶上のコントロールセンタへの上り通信では、映像や姿勢のデータを伝送します。実証実験で使用したパラメータにおけるスループット性能は164kbit/sで、図5に示す、640×420px、10fpsの映像を、コントロールセンタの水中ドローン制御用PCに表示可能であることを確認しました。実証実験における上り通信の復調成否および推定SNR(Signal-to-Noise Ratio)特性の例を図6に示します。無線型水中ドローンを引き上げる際にダイバーの気泡により音波が遮断される場合を除き、復調失敗が発生することなく安定した上り通信が可能でした。コントロールセンタから無線型水中ドローンへは、コントローラ操作による制御コマンドを伝送します。スループット性能は13kbit/sで、コントロールセンタのPCに表示される映像を見ながらコントローラによる制御を行い、無線型水中ドローンの自由な移動が可能であることを確認しました。映像を見ながら鉄パイプの状態を1本ずつ確認するような基本動作の実証だけでなく、鉄パイプをかわして船舶の底をくぐり抜けて移動するといった、ケーブルがあると不可能な動作にもチャレンジし、遠隔無線制御ならではの自由度の高い操縦が可能であることを実証しました。
なお、この実証実験では音響通信の適用対象が小型であり音響通信装置等の搭載スペースや質量が限られること、また、海中の映像伝送に必要となる通信帯域が150kbit/s前後であったということから、音響通信装置等は性能を抑えた構成として搭載し、さらに通信速度より高い安定性を優先した設定で動作させています。

今後の展開
水中ドローンの完全遠隔無線制御以外にも、さまざまなユースケースにおける海中無線通信利用を可能にする超カバレッジ拡張の実現をめざし、海中音響通信のさらなる高速化・長距離化・安定化に取り組んでいきます。また、海中音響通信技術のさまざまなユースケースについて、NTTグループやパートナー企業とともに実用化に向けた取り組みを加速させていきます。
■参考文献
(1) https://www.docomo.ne.jp/corporate/technology/whitepaper_6g/
(2) 増野・藤野・工藤: “6G時代の多様な無線アクセスを支える先端無線技術の研究開発,”NTT技術ジャーナル,Vol. 34, No. 5, pp.21-24, 2022.
(3) 藤野・福本:“水中音響通信の高速化に向けた時空間等化技術,” 信学通誌,Vol. 15, No. 4, pp.284-297, 2022.
(4) 藤野・大森・福本:“海中音響通信の高速化を実現する独自技術「時空間等化技術」のさらなる進化,” 日経ビジネスコミュニケーション,Vol. 59, No. 9, pp.26-29, 2022.
(5) H. Fukumoto, Y. Fujino, M. Nakano, K. Sakamoto, and T. Tsubaki:“Field Experiments Demonstrating Mbps-Class Underwater Acoustic Communication with Spatio-Temporal Equalization,” Global Oceans 2020, pp. 1-6, Oct. 2020.
(6) https://group.ntt/jp/newsrelease/2022/11/01/221101a.html
(7) 福本・奥村・藤野・大森・伊藤・石原・田端:“水中音響通信を用いた無線制御型ROVの実験実証,”電子情報通信学会総合大会,B-5-117,2023.

(上段左から)奥村 亮太/福本 浩之/藤野 洋輔
(下段左から)大森 誓治/伊藤 勇弥





将来的には、現在の陸上と同じように海中でもスマートフォンなどで当たり前に通信ができるような世界の実現をめざし、海中音響通信技術の研究開発に取り組んでいます。