2020年11月号
特集
コネクティッドカー分野の技術開発・検証
- コネクティッドカー
- IoT
- ビッグデータ
トヨタ自動車株式会社とNTTは、トヨタが保有する「自動車に関する技術」とNTTグループ各社が保有する「ICTに関する技術」を組み合わせて、コネクティッドカー分野での技術開発・技術検証を目的に協業を行うことに合意し、現時点の技術開発の完成度を確認するために実証実験を開始しています。本稿では、コネクティッドカー向けICT基盤の概要、技術課題やその実現に向けて取り組んでいる関連技術および実証実験について紹介します。
磯村 淳(いそむら あつし)†1/松尾 和哉(まつお かずや)†1/横畑 夕貴(よこはた ゆき)†2/平林 義和(ひらばやし よしかず)†3/小泉 敦(こいずみ あつし)†3
NTTデジタルツインコンピューティング研究センタ†1
NTTスマートデータサイエンスセンタ†2
NTT研究企画部門†3
コネクティッドカー向けICT基盤の研究開発活動
トヨタ自動車株式会社とNTTグループは、協業に合意以降、将来の自動運転の実現を見据えたコネクティッドカー向けICT基盤の技術開発に取り組んでいます。安心・安全な自動運転を実現するためには、クルマから得られるさまざまなデータをセンタに集めて活用することが期待されており、コネクティッドカー向けICT基盤の研究開発が大きく寄与できるものと考えています。
コネクティッドカー向けICT基盤
コネクティッドカーとは、ICT端末としての機能を有する自動車のことです。クルマは多くの情報を保有しており、クルマから集めたデータによりクルマおよびクルマの周辺環境を理解することが可能となります。交通事故低減や渋滞緩和等の社会課題の解決やモビリティサービスの進展のためには、コネクティッド化されたクルマからネットワークを介して集めたデータを活用することが必要不可欠になってきます。
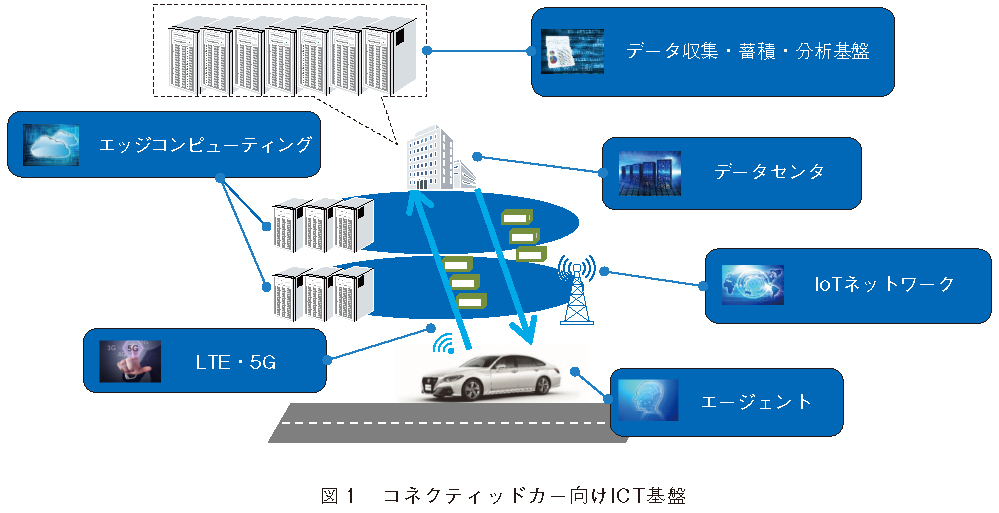
コネクティッドカーを支える基盤技術については、多数のクルマから大量に受信する車両情報等の収集・蓄積や収集した大量データのリアルタイムなデータ分析や周辺環境をクラウド上に再現、行動を判断するためのAI(人工知能)アルゴリズムおよび大容量データを配信する技術と5G(第5世代移動通信システム)やエッジコンピューティングおよびIoTネットワークを活用した大容量データを確実かつ安全に集配信するための通信技術等があります。
具体的には、公道を走行するクルマに搭載されたECU(Electronic Control Unit)のデータやカメラなどのセンサデータ等の大規模、大容量なデータを確実かつ効率的にセンタに収集し、収集した多数の車両からの大容量なデータを活用して、リアルタイムに走行状態等の車両状況やクルマの周辺状況をサイバー空間に再現することが、次世代交通システムに用いる地図生成等、さまざまなサービスや自動運転の実現に大きく貢献できると考えています。コネクティッドカー向けICT基盤は、この車両状況やクルマの周辺状況をサイバー空間に再現することを支えています(図1)。
実証実験
コネクティッドカー向けICT基盤の開発においては、個々の技術要素の検討と検討結果を組み合わせて、クルマ~ネットワーク~センタまでのEnd to Endでの検証による実証実験を短いサイクルを回して取り組んでいます。実証実験においては、公道を走行する複数の実験車両からネットワークを介してデータをセンタに収集し、収集したデータを分析し、コネクティッドカーおよび自動運転に必要なユースケースの技術課題の実現を確認するとともに、数百万台規模の車両データ負荷を発生させ、通信技術やセンタ側技術の実現性評価に取り組んでいます。
具体的なユースケースについては、①高精度地図生成、②障害物検知・通知、③レーンレベル渋滞検知、などを想定し、ユースケース実現のために必要な技術要件の達成度を確認しています。
(1) 高精度地図生成
車載カメラが撮影する動画データをセンタに集約し、車両位置情報、周辺情報等を再現できるかを検証しています(図2)。
具体的には、車両に搭載した単眼カメラで撮影した動画データやクルマの位置情報をセンタに収集し、収集したデータを解析することで道路上のペイントや標識等の構造物の位置を高精度に推定するための技術開発を進めています。
現在は計測車両での現地調査によって道路変化を把握しており、調査費用やリアルタイム性が課題であり、一般的な車両に搭載されたカメラのデータから高精細な地図生成するために本取り組みの技術が貢献できると考えています。
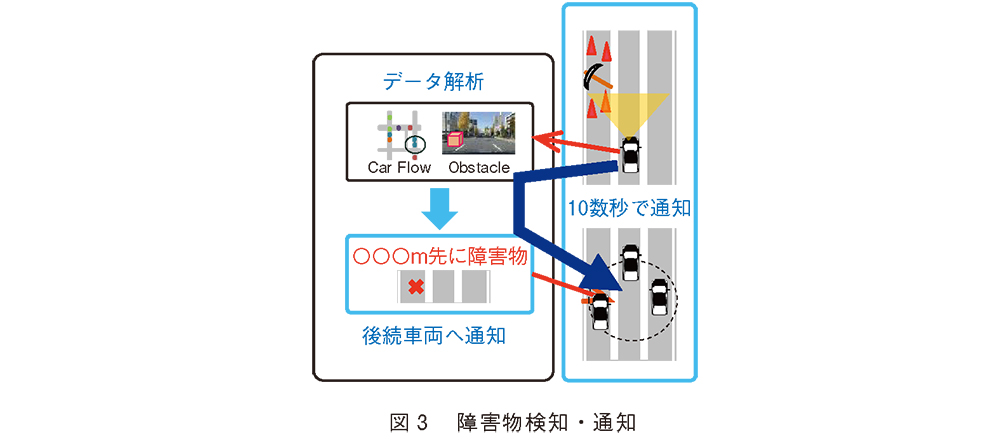
(2) 障害物検知・通知
1台のクルマから送信されたデータを基に、他のクルマに関連するデータをリアルタイムに共有することができるかを検証しています(図3)。
具体的には、車両に搭載した単眼カメラにて撮影した画像から障害物の位置を推定し、障害物情報をダイナミックマップに登録し、その障害物の影響を受ける車両を高速に検索のうえ、障害物情報を通知する一連の処理を10秒弱の時間にて実現するため、ネットワークを介したデータの収集・蓄積・分析および配信のすべての処理を高速化するための技術開発を進めています。
(3) レーンレベル渋滞検知
車載カメラが撮影する動画データを基に、隣接レーンのクルマの渋滞状況等を再現できるかを検証しています。
具体的には、車両に搭載した単眼カメラにて撮影した画像から走行レーンを推定し、隣接レーンを走行する渋滞車列の状況を正確に推定するための技術開発を進めています。
実証実験における基盤技術の技術目標については、いくつかのユースケースを軸に設定した技術目標である数千万台の接続車両台数、数秒のリアルタイム性等を設定しています。この実証実験は、2018年より開始し、2020年度まで段階的に実施していく予定としており、500万台の接続車両台数、十数秒のリアルタイム性の確認は完了しています。

ICT基盤を支える主な技術
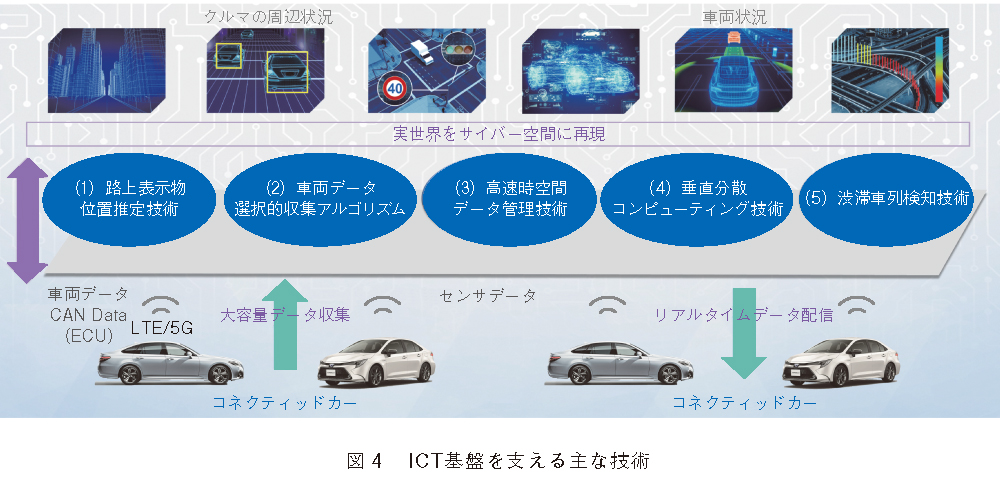
コネクティッドカー向けICT基盤にはさまざまな技術課題が存在します。それらの課題解決のために研究開発に取り組んでいる代表的な技術を紹介します(図4)。
(1) 路上表示物位置推定技術
車載カメラが撮影する動画データや走行データを収集・分析して、道路の周辺情報(標識・看板等の位置情報と内容)を推定する技術です。市販の安価なドライブレコーダーでも対応可能であり、大量データから良質なデータを選別し、統計処理することで、位置精度を向上させることができます。標識・信号機などの道路上の立体地物を正確に認識することに加え、地物の位置を高精度で推定することで、地図へマッピングすることが可能となります。将来的には自動運転用の地図の生成や地物情報の自動更新などへの活用が期待できます。
(2) 車両データ選択的収集アルゴリズム
コネクティッドカーから収集するデータは、車両データ、動画像データ、センサデータと多岐にわたり、ボリュームも大きいです。これが車両台数分、さらに逐次収集するとなると、膨大な量となり、トラフィック増によるネットワークやデータ処理の高負荷が懸念されます。そこで、位置情報や時刻情報、センサの種別、解像度、観測範囲、周辺車両による遮蔽状況といったメタ情報に基づき、データ収集の優先順位を判断する技術を開発しました。これにより、観測範囲の重複が少ないデータを効率良く収集することや、通信回線と分析基盤の負荷状況に応じて収集量を調節することが可能となります。
(3) 高速時空間データ管理技術
大量の車両データを瞬時に格納し、特定の範囲(時間・空間)で高速に検索可能とする技術です。具体的には、自動車やスマートフォンなどの動くモノが生成する時刻情報・位置情報を独自方式で1次元データとして管理し、特定時間範囲内かつ特定の空間範囲内に存在した車両の検索や、道路や駐車場などの複雑な形状の空間検索を高速に行える時空間データベースです。実空間上の大量の動的オブジェクトが生成したセンサ情報と、そのセンサ情報に紐付けられた時間情報と空間情報を格納しつつ、ある特定の時間情報と空間情報を矩形範囲で指定して、そこに含まれるセンサ情報を高速に検索が可能となります。
(4) 垂直分散コンピューティング技術
従来、センタなどで行っていた処理機能を、エッジサーバに分散処理させることで、高速なアプリケーション処理を実現する技術です。すべてのデバイスに対して即応答を実現しようとすると、サーバのリソース不足により、高速応答の実現が困難になる場合が発生しますが、実際には車両の状態(車両の速度・移動方向・時間帯など)ごとに高速応答の必要性が異なります。そこで、車両の状態に応じて、応答処理を実行するサーバを動的に変更することで、限られたサーバリソースを有効利用しつつ、必要な車両に確実に高速応答ができるようアプリを動的に分散配置することが本技術のねらいです。これにより、大量の車両を収容し、大量 のデータの収集・応答が可能となる、限られた分散コンピューティングリソースの効率的な利用を実現します。
(5) 渋滞車列検知技術
車載カメラが撮影する動画データや走行データを収集・分析して、レーン単位の渋滞車列を検知する技術です。周辺レーンを走行する車両の相対位置関係から車列を検知します。さらに車列の先頭・末尾車両の位置を把握し、周辺情報と組み合わせることで、原因の推測も可能となります。現在、VICS(Vehicle Information and Communication System)や地図アプリ等で道路単位の渋滞情報は取得可能ですが、本技術が実用化・普及すれば、より細やかな渋滞情報の把握が可能となります。なお、前述の「路上表示物位置推定技術」と同様、安価なドライブレコーダーによる映像から検知可能です。
まとめ
自動車業界では今まさに100年に一度の変革期にあたるといわれており、ここ数年で自動車を取り巻く環境は大きく変化しています。その中でも、コネクティッドカーが普及することによって、運転者・同乗者やメーカー、保険会社、整備工場などに対して、さまざまなサービスが実現しつつあります。
今後さらに車両ビッグデータをすばやく・大量に・廉価に処理することができれば、既存センサではとらえられない情報の活用や、より迅速で確実なサービスの実現によって、利便性や効率性が向上するだけではなく、来るべき自動運転時代に向けた安心と安全をもたらすことが期待できます。トヨタとNTTグループとの協業成果が少しでも寄与できるよう、さらなる研究開発および技術確立に取り組んでいきます。
■参考文献
(1) https://www.ntt.co.jp/news2017/1703/170327a.html

(上段左から)磯村 淳 /松尾 和哉/横畑 夕貴
(下段左から)平林 義和/小泉 敦
問い合わせ先
NTT研究企画部門
プロデュース担当(モビリティプロデュース)
TEL :03-6838-5370
FAX :03-6838-5349
E-mail :contact_mobilityp@hco.ntt.co.jp




クルマのデータを活用することによって、事故や渋滞といった社会が直面している課題の解決をめざし、トヨタとNTTグループの協業を通して、さまざまな技術の開発や検証に取り組んでいます。