2021年5月号
特集
医療健康の未来を拓くバイオニクス技術
- 生体工学(バイオニクス)
- 生体模倣システム
- サイバネティックス
工学の技術や理論を駆使することで生体の構造や機能を解明し、新しい技術として応用する学問を生体工学(バイオニクス)と呼びます。生体系と工学系を双方向的につなぐ技術の確立は、バイオデジタルツインの実現や医療・ヘルスケアに対する新たな技術の創出にとって重要です。本稿では、NTT物性科学基礎研究所とNTTサービスエボリューション研究所がそれぞれ展開しているバイオニクス技術について紹介します。
高橋 陸(たかはし りく)†1/田中 あや(たなか あや)†1
山口 真澄(やまぐち ますみ)†1/小池 幸生(こいけ ゆきお)†2
NTT物性科学基礎研究所†1
NTTサービスエボリューション研究所†2
生体情報の取得に向けた生体機能デバイス技術の取り組み
バイオニクスの潮流には2つの方向があります。1つは生体から工学へ向かう流れであり、生体の機能や構造の人工的な再現を目的としています。近年、半導体の微細加工技術や3Dプリンティング技術の進展により、ナノ・マイクロメートルの微小スケールにおいても生体を模した表面形状や立体構造を再現できるようになってきました。こうした微細構造と種々の細胞を組み合わせ、臓器の機能や構造の一部を実現する技術として、生体模倣システム(Microphsiological Systems:MPS)が注目されています。微細加工によって細胞培養の足場構造をつくり出すことで、生体内の微小な空間や、血流や伸縮運動による機械刺激といった生理的環境を人工的に再現することができます。その結果、従来の培養方法では実現できなかった高次なin vivo(生体内)機能を、高精度で多角的な観察や評価が可能なin vitro(生体外)で発現できることが期待され、これまでに心臓、肝臓、腎臓などを模倣したデバイスが報告されています(1)。 単一臓器の完全再現モデルや、多臓器の連結による異種臓器間の相互作用モデルの構築は、臓器に対する正確な薬物動態予測といった創薬分野での応用はもちろん、バイオデジタルツインの実現に求められるパーソナライズされた生体情報を分子・組織・臓器レベルごとに取得・解析することが可能な技術として限りない可能性を秘めています。
既存のMPSデバイスの多くは、ポリジメチルシロキサン(PDMS)と呼ばれる、加工性・透明性・酸素透過性に富んだゴム状の材料を基材としています。一方で、より高次の機能を長期間安定して細胞に発現させたり、細胞が分泌・吸収する分子を通じて外界と相互作用させたりするためには、材料のレベルから生体環境に近づけることが重要であると考えられます。そこでNTT物性科学基礎研究所では、より生体に類似した素材である「ハイドロゲル」に着目しました。コンタクトレンズに代表される本材料は、ポリマー(低分子化合物がつながったもの)や分子の集合体がジャングルジムのような網目構造を形成しており、その内部に多量の水を保持することができます。本構造は生体内における細胞の足場である細胞外基質に類似しており、高い生体親和性を示します。加えて、水を媒介とした低分子の透過性や水分の流出入による体積変化など、通常の固体材料にはない特異的な機能を備えています。本稿ではまず、物質の出入りや形状変化といった生体内環境のダイナミクス環境をも再現可能なMPSデバイス実現に向けた、ハイドロゲルの加工技術について紹介します。
座屈剥離に基づくハイドロゲルの3次元構造形成
水を多く含む柔らかい材料であるハイドロゲルを、血管や腸管のように薄膜かつ中空な管状構造へと自立させる技術として、「座屈剥離」と呼ばれる物理現象に着目しました。机の上に置いた紙を両端から圧縮すると、中央部が湾曲しつつ盛り上がり、アーチ状の構造へと変形します。これが、たわみながら(座屈)はがれる(剥離)という座屈剥離現象であり、私たちはハイドロゲル薄膜へ本現象を適応させる手法を考案しました(2)。その例を図1に示します。まず、汎用的なリソグラフィ技術*を用いて固体基板上に接着分子をパターニングすることで、剥離個所を規定します。次に、その基板上でハイドロゲルを作製することで、固体基板とパターン状に接着されたハイドロゲル薄膜が得られます。その後、ハイドロゲルを水にさらすことで水を吸って膨らむ膨潤が生じます。これにより、ハイドロゲル薄膜は膨潤圧により圧縮され、非接着部位において特異的に座屈剥離が誘起されます(図1(a))。形成される構造は、ハイドロゲルの硬さ・厚み・膨潤度や非接着部位の幾何構造などの物理パラメータで制御され、さまざまな3次元形状へと加工可能です(図1(b))。
* リソグラフィ技術:感光性の物質を塗布した基材の表面を、パターン状に露光することで、露光された部分とされていない部分からなるパターンを生成する技術。半導体デバイスにおける電子回路の作製等に多用されます。
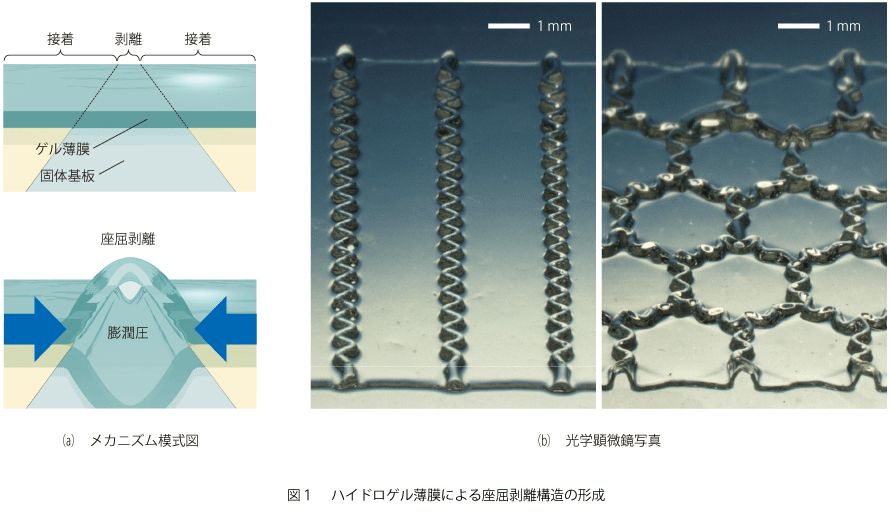
図1 (b) 光学顕微鏡動画
ハイドロゲル加工技術の今後の展開
本技術の3つの特徴を用いたデバイス展開について図2に示します。1番目は、大面積に所望の接着・非接着部位の2次元パターンを描くことで座屈剥離構造を再現性良く誘起できる点です。これにより、蛇行・平行・合流といった流路構造を自在に作成することができ、ハイドロゲル薄膜を基材とするマイクロ流体デバイスとして使用することができます(3)(図2(a))。2番目は、ハイドロゲルと固体基板のヘテロ(異なる2種の)構造によりそれぞれの機能を個別に設計できる点です。ハイドロゲル側の機能として、流路内での細胞培養や流路外への物質拡散が可能です(図2(b)、(c))。将来的に、固体基板側へセンサ素子を導入することで、生体を模倣した環境をリアルタイムで測定するデバイス展開などが期待されます。3番目は、普遍的な物理現象に基づく加工方法であるため、さまざまな種類のハイドロゲルに適応でき、機能を付加できる点です。例として、熱刺激に応答して水分量の調節が可能な刺激応答性ゲルを基材とすることで、刺激に応じた構造の動的な制御が可能です(図2(d))。
こうした要素技術を発展・複合させていくことで、生体機能をデバイス上で再現しながら、多角的なデータ取得の可能なNTT独自技術として発展できるものと考えています。
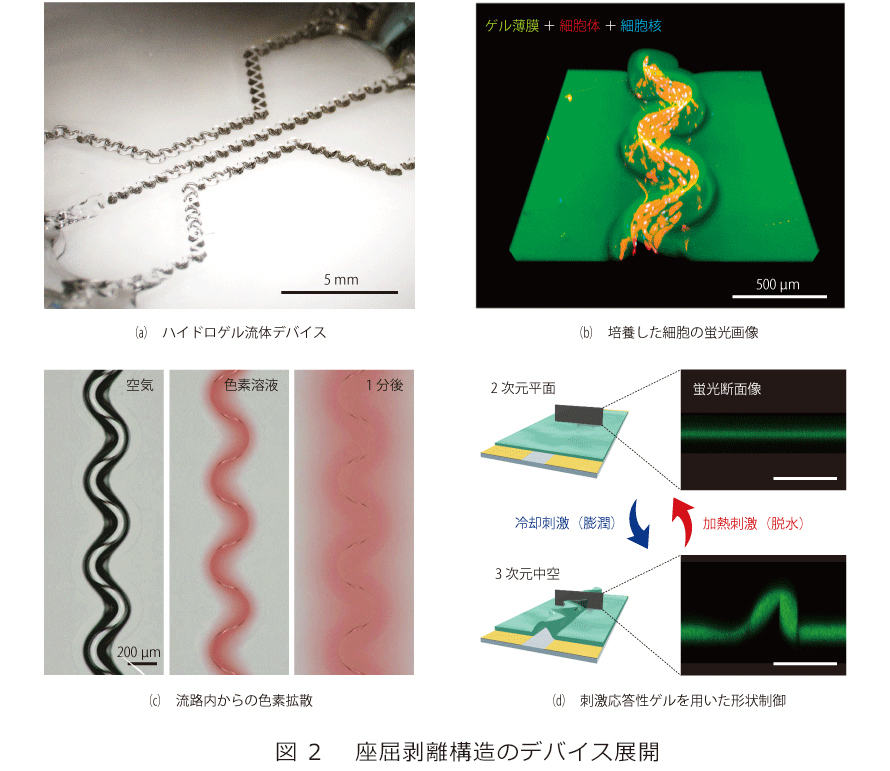
図2(b)培養した細胞の蛍光観察動画
図2 (d)刺激応答性ゲルを用いた形状制御
ハンディキャップ支援に向けたサイバネティックス技術の取り組み
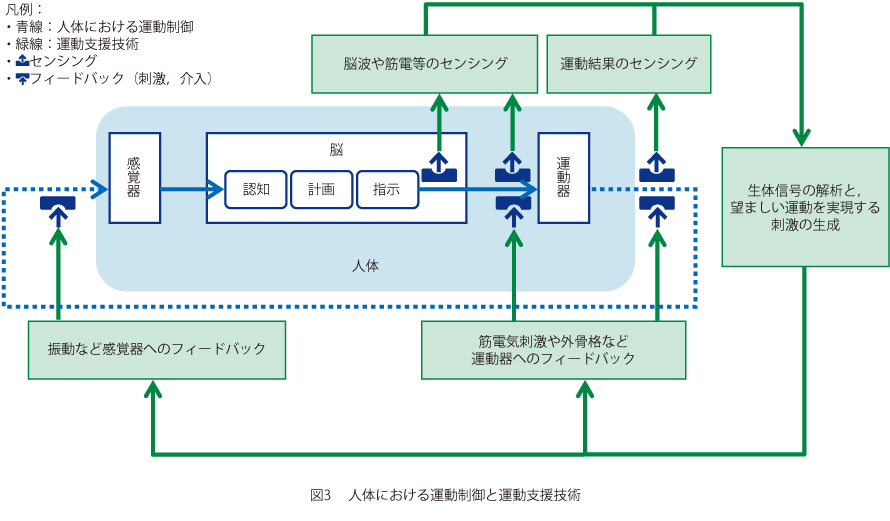
バイオニクスのもう1つの潮流は工学から生体へ向かう流れであり、通信理論や制御理論を体内での情報伝達や制御の仕組みに応用することを目的としています。特に1948年にノーバート・ウィーナーが提唱した「サイバネティックス」(4)は、生体と機械における通信と制御を統一的に扱おうという考え方であり、近年においても重要であり続けています。NTTサービスエボリューション研究所ではこの考え方に改めて着目し、サイバネティックス技術の取り組みとして、人の運動能力を支援・拡張する技術開発に取り組んでいます(図3)。
人体における運動制御は、感覚器で受けた刺激が脳によって知覚・認知され、脳内での行動計画に基づき発された運動の指示が運動器に伝達され、運動器である筋肉が収縮することで実行されます。また、その結果が新たな刺激として感覚器が受容するサイクルが繰り返されます。サイバネティックス技術の取り組みとして、人体における感覚器から脳、脳から筋骨格への通信やそれらを通じた運動制御に対し、脳波や筋電等の生体信号や運動結果のセンシングと、振動等触覚刺激や筋電気刺激、外骨格などによる感覚器や運動器へのフィードバック(刺激、介入)によりこのサイクルに介入し、運動状況の把握・改善に関する取り組みを実施中です。併せてセンシングした生体信号の解析と、望ましい運動を実現するフィードバックの生成にも取り組み始めています。
生体信号を活用した運動支援・拡張
生体信号のセンシング・解析とフィードバックによる、生体信号を活用した運動支援・拡張のコンセプトについて紹介します。
誰でも、日常動作や各種技能における運動機能を、他者(熟練者)や過去の自分の運動を基に、自分自身をより良く運動制御できる世界をめざすことです。運動の再現およびその体験により、能力の一時的・恒久的な拡張をめざします。例えば、熟練者の動きの自身での再現、およびそれを繰り返すことによる効果的な訓練や、若いころの運動体験を基にした今の身体状況に合わせたリハビリなどの可能性があるのではないかと考えています。
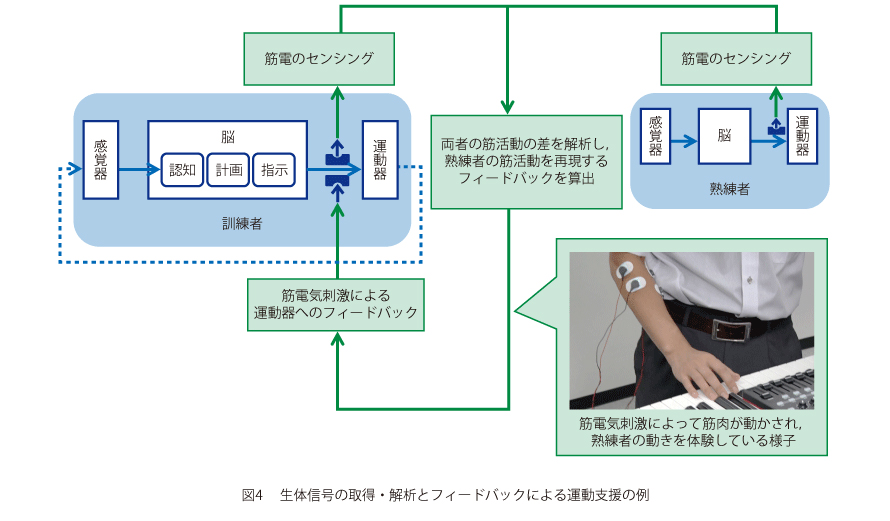
例としてピアノのトレモロ演奏(音程が離れた音を交互に弾く奏法)における運動支援(5)について述べます(図4)。初心者は指を動かすことを意識して演奏するが、熟練者は手首を回転させることを意識して演奏するといわれています。これに対し、初心者(訓練者)と熟練者の生体信号として筋電をセンシングし、両者を比較することで両者の筋活動の差を解析します(筋肉種別ごとの強度差など)。次に熟練者の筋活動を再現するようなフィードバックを算出します(外部からの筋電気刺激による筋肉収縮など)。そして初心者(訓練者)の体にフィードバックを行います。図中の写真では手首を回転させる筋(回外筋、回内筋)に筋電気刺激を提示して手を動かし、熟練者の動きを体験している様子を表しています。この体験を通じ効果的な訓練が実現できるのかの評価を進めています。
この例では筋電に着目した取り組みとして紹介しましたが、脳波など筋電以外の生体信号も含め検討を進めています。
サイバネティックス技術の今後の展開
手を伸ばす、物をつかむ、ボタンを押す、立つ、歩く、などさまざまな運動が日常生活や社会参画、また自己表現において重要です。一方で、障がいや加齢によって運動において制限された生活を強いられる場合があり、これらハンディキャップに対する運動面での支援への期待が大きいと考えています。
脳波や筋電などのセンシングや、筋電気刺激や外骨格などのフィードバックの取り組みはさまざまに存在しており、今後も高度化が進むと想定しています。例えば、ハンディキャップ支援として日常的に利用するため特定部位・特定動作に対して確実な動作を期待する技術・製品(義手など)が、部位の拡大や複雑な動作への対応を求められることとなるでしょう。その際には扱う生体センシング情報や、フィードバックのための制御情報は今以上に情報量が多くなり、複雑化するうえ、前述の例のようにそれらの情報を連携し扱う必要が出てくるはずです。
NTTサービスエボリューション研究所では、これまでにも筋電等の生体センシング技術(6)や触覚刺激や筋電気刺激を用いた人体へのフィードバック技術、またハンディキャップ支援に取り組んできました。これまで培ってきた生体センシング技術、フィードバック技術など、蓄積された技術的強みを活かすことで、部位の拡充や複雑な動作への対応をICTの観点から補助・支援できるのではないかと考えています。サイバネティックス技術の取り組みをハンディキャップ支援に向けたトレーニングやリハビリテーションへの適用をめざし検討を進めていきます。
■参考文献
(1) D. E. Ingber :“Reverse Engineering Human Pathophysiology with Organ-on-Chips,”Cell, Vol. 164, No. 6, pp.1105-1109, March 2016.
(2) R. Takahashi, H. Miyazako, A. Tanaka,and Y. Ueno :“Dynamic Creation of 3D Hydrogel Architectures via Selective Swelling Programmed by Interfacial Bonding,”ACS Applied Materials and Interfaces, Vol. 11, No. 31, pp. 28267-28277, July 2019.
(3) R. Takahashi, H. Miyazako, A. Tanaka, Y. Ueno, and M. Yamaguchi :“Tough, Permeable and Biocompatible Microfluidic Devices formed through the Buckling Delamination of Soft Hydrogel Films,”Lab on a Chip, Vol.21, No.7, pp. 1307-1317, March 2021.
(4) ウィーナー:“サイバネティックス──動物と機械における制御と通信,”岩波文庫,1962.
(5) A. Niijima, T. Takeda, R. Aoki, and Y. Koike :
“Reducing Muscle Activity when Playing Tremolo by Using Electrical Muscle Stimulation,”Proc. of AHs 2021, Feb. 2021.
(6) T. Isezaki, H. Kadone, A. Niijima, R. Aoki, T. Watanabe, T. Kimura,and K. Suzuki :
“Sock-Type Wearable Sensor for Estimating Lower Leg Muscle Activity Using Distal EMG Signals,”Sensors, Vol. 19, No. 8, April 2019.
(上段左から)高橋 陸/田中 あや
(下段左から)山口 真澄/小池 幸生





生体にアプローチする方法として、バイオニクス技術は大変重要と考えています。今後、いち早くバイオデジタルツインや医療・ヘルスケアに向けた新技術を創出できるよう、各研究所と協力して研究を推進していきます。