2021年10月号
特集
人と機械の共生をめざすサイバネティックス技術
- 人と機械の共生
- 運動支援
- 身体知
近年の計算機技術とAI(人工知能)技術の発展に伴い、高度な技術を用いたサービスを日常生活に利活用できる環境が急速に整いつつあります。私たちは、従来技術に対して、より人間らしく認識・理解する機構を導入することで、人の生活を高いレベルで機械がサポートし、人と機械が共生する豊かな社会の実現をめざしています。本稿ではこれらに対する取り組みについて紹介します。
青野 裕司(あおの ゆうし)/瀬下 仁志(せしも ひとし)
松村 成宗(まつむら なりむね)/小池 幸生(こいけ ゆきお)
松村 誠明(まつむら まさあき)
NTT人間情報研究所
人と機械の共生をめざして
近年、計算機の演算能力が飛躍的に増加し、画像処理・認識精度が向上しただけでなく、各種センサの情報をクロスモーダルに扱う技術が洗練され、これまではSF等でしか描かれてこなかった自動車の自動運転も徐々に現実的なものになりつつあります。また、音声認識や文字認識・文脈理解の精度向上に伴い、チャットボットに代表される自動応対エンジンが窓口業務のサポートを行うようになり、スマートフォンに代表される高い演算能力を持つモバイル端末を持ち歩くようになったことから、高度なICTを用いたサービスを日常生活に利活用できる環境が急速に整いつつあります。これらの認識・理解の精度向上に大きく寄与している技術の1つが、大量の実データを用いて機械学習を行うAI(人工知能)技術です。
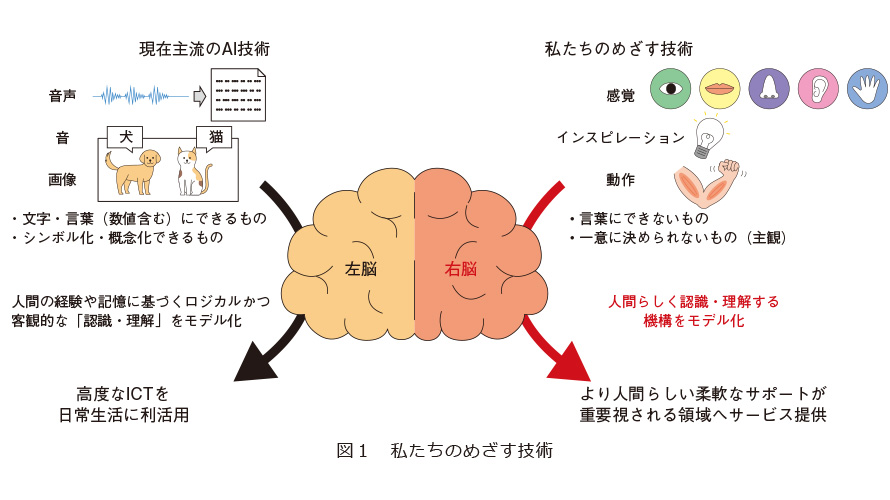
現在主流のAI技術は、人間の経験や記憶に基づくロジカルかつ客観的な「左脳のような働きを持つ認識・理解」をモデル化しているようなものであり、主に言葉で表現できるものや、画像・データのようにシンボル化できるものを対象として、人々の利便性向上に資することをめざしてきました。
これに加えて私たちは、感覚や動作など言葉にできないものや、個々人によって判断が異なるような主観的で一意に表せないものに対する「人間の右脳のような働きを持つ処理・作用プロセス」を解明し、より人間らしく認識・理解する機構を導入することで、人の生活を高いレベルで機械がサポートし、人と機械が共生する豊かな社会の実現をめざしています(図1)。
これらを実現するためのアプローチとして、私たちが検討を進めている取り組みの中から、高精度に人間の生体信号をセンシングしてその運動を支援する「運動支援」に対する取り組み、非言語で経験的な技能の獲得・発揮を支援する「身体知」に対する取り組み、遠隔操作ロボットを人間が操作する際の体感時間を制御する「ゼロレイテンシ」に対する取り組みの各技術について紹介します。
運動支援
1948年にノーバート・ウィーナーが提唱した「サイバネティックス」は、生体と機械における通信と制御を統一的に扱おうという考え方です。私たちはこの考え方に改めて着目し、人の運動を支援する技術開発に取り組んでいます。
人の運動は、脳からの運動指示が筋肉に伝達され、筋肉が収縮することで実行されます。また、その結果を刺激として感覚器を通じて脳が知覚・認知し、新たな運動の計画・指示を繰り返します。この人体における通信や制御に対し、脳波や筋電位等の生体信号のセンシングやフィードバックにより支援しようという試みです。
より具体的には、他者(熟練者)や過去の自分の運動を基に、今の自分自身に対して再現(転写)することで、運動能力の一時的・恒久的な拡張・支援を実現し、自分自身がより良く運動(生活)できる社会の実現をめざします。例えば、各種技能・スポーツにおいて熟練者の筋肉動作を筋電気刺激で再現するトレーニングや、日常動作において自身の運動記録を基にしたリハビリテーションなどが考えられます。
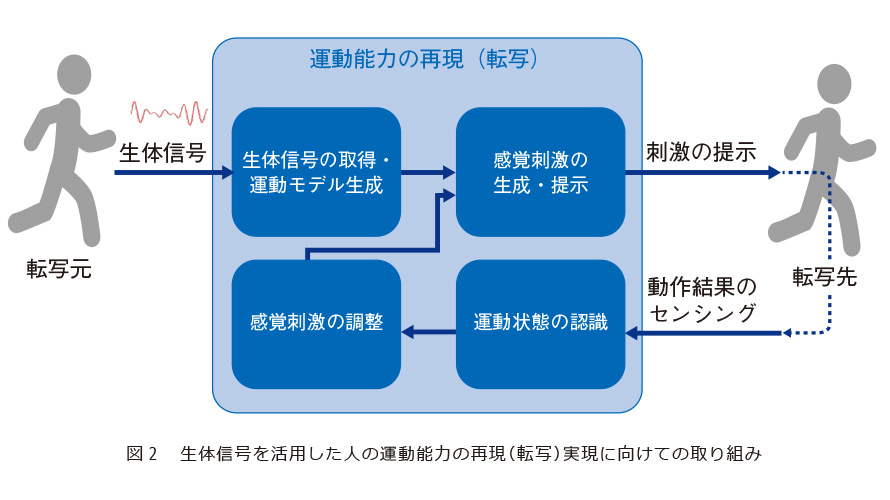
生体信号を活用した人の運動能力の再現(転写)実現に向けて、以下の4つの機能が必要と考えており、これらの実現に向けて取り組んでいます(図2)。
・生体信号の取得・運動モデル生成:転写元の生体信号(脳波・筋電位等)をセンシングし、生体信号と運動の関係性を表す運動モデルを生成します。
・感覚刺激の生成・提示:生成した運動モデルを基に、転写先を運動制御する感覚刺激(筋電気刺激・振動・外骨格等)を生成し、提示します。
・運動状態の認識:刺激を受け動作した転写先の運動結果や生体信号をセンシングし、姿勢や筋肉収縮などの状態を認識します。
・感覚刺激の調整:運動状態の認識結果と運動モデルを基に、より良い運動結果や自然な運動体験となるよう感覚刺激のパラメータを調整します。この結果を基に転写先への新たなフィードバックを実施します。
私たちは、これまでにも筋電位等の生体センシング技術や触覚・筋電気刺激を用いた人体へのフィードバック技術に取り組んできました。一方で人の運動メカニズムは複雑であり、運動支援・運動能力拡張に関しては生理学分野・脳科学分野・生体医工学分野などさまざまな取り組みが進んでおり、学際的なアプローチが必要です。今後に向けて、蓄積された技術的強みを活かすとともに、社内外の専門家との学際的な連携を通じ、技術実現およびそれを通じた運動メカニズムに関する新たな知見の獲得をめざします。
運動にかかわる人間の処理・作用プロセスを解明し人間の能力拡張により、より高いレベルで人と機械が共生する社会の実現をめざしていきます。
身体知
人間の生活・社会的な活動にあって、「知(識)」は人の行動・思考の質や効率を高め、精緻にする基礎となるものです。それゆえに長い歴史の中で蓄積されてきた「知」を獲得し、日常のさまざまな場面で発揮することは、今を生きる人にとって重要な行為であるといえます。
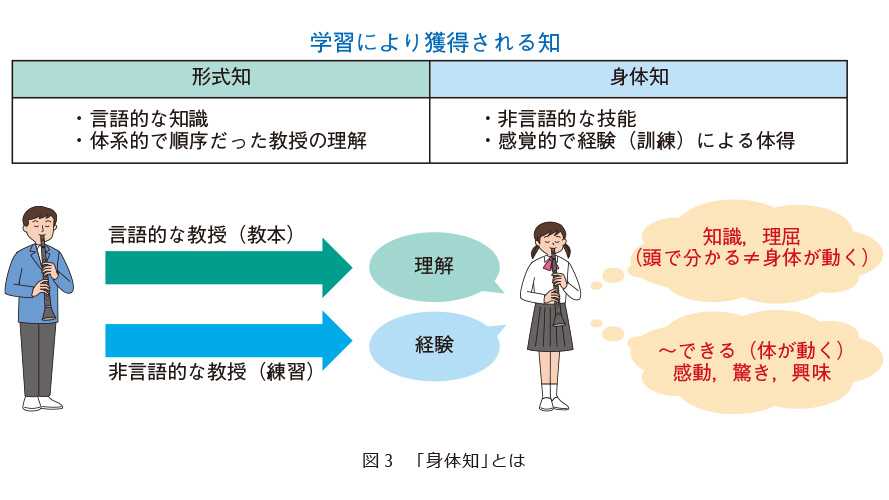
ところで「知」を獲得するといってまず想像されるのは、学校での勉強・教科学習のようなものではないかと思われます。そうした、すでに体系化され、記述された知を「形式知」と呼び、その習得や発揮の方法が広く実践されていることは、誰もが経験しているところです。では、「知」とは「形式知」だけを指すものかというと、そうではありません。人が学び、発揮する「知」の中には体系立てることや記述することが困難で、頭で理解するのでなく経験を重ねることでしか文字どおり身に付けることができないタイプの「知」が存在します。それが、「身体知」と呼ばれるものです。
例えば「楽器の演奏ができるようになる」ために、一般には教本が存在し、楽器の扱い方や機能・手指の運びなどが「体系的に記述」されています。では、これをすべて読み込んで「理解」できれば楽器が演奏できるようになるかというとそうではなく、実際には、その理解に立って自分の身体を動かし、練習を重ねることで初めて演奏できるようになります。このことは、教本に表された「形式知」とは別の、身体活動そのものに根差す「知」である「身体知」が存在することを示しています(図3)。
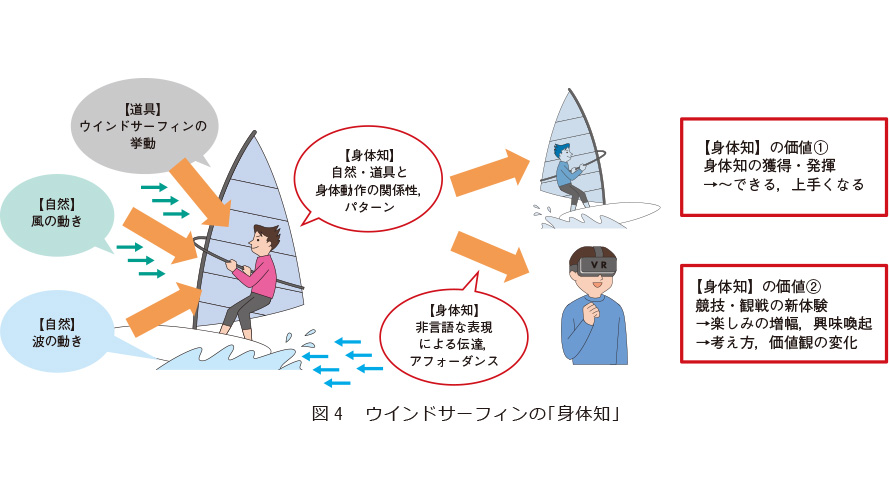
その性質上、「身体知」は行為者自身の感覚・主観に負うところが多く、客観的で言語化しやすい「形式知」のようにICTを活かした習得・発揮の支援とは縁遠いものでした。しかし、昨今の技術進化の中で、より当事者が受ける感覚に近い情報のセンシングや高速処理が可能になってきたことを背景に、私たちは行為者自身の認知を起点に行為の仕組みをとらえるネオ・サイバネティックスの観点から「身体知」の研究に取り組んでいます。具体的には、スポーツにおける「身体知」の獲得や発揮の仕組みを明らかにし、その支援を可能にすることを目的として、ウインドサーフィンを題材に競技者の身体活動と、自然環境や道具の挙動・競技パフォーマンスの間に潜むパターンを見出す分析手法と、見出したパターンを他者に伝える伝達表現、およびその表現を受けとった側にもたらされる価値(身体知の獲得や発揮、あるいは競技や自然に対する興味関心の変化)の向上について、実際の競技者のデータを基に検討を進めています(図4)。
「身体知」研究において、スポーツの領域は典型的なものといえますが、前述のような楽器の演奏・絵の描き方・上手なプレゼンなど、身体的な動作と強く結びついて獲得・発揮される「知」である技能は日常のさまざまな場面に存在します。そのため、私たちはスポーツ以外の領域についても並行して検討を進めながら、これまで人の中に閉じられてきた「身体知」を、身に付けたいその人自身の視点に寄りそうICTにより、誰もが獲得し、発揮できる世界の実現をめざしていきます。
ゼロレイテンシ
遠隔操作ロボットによる物理作業は、看護や介護等のサービス業での人手不足解消やパンデミック下の医療機関や災害現場等の危険作業での安全確保に非常に有望であるといえます。
しかし、遠隔操作においては操作者とロボットの間で必ず遅延が発生し、この遅延により作業ミスや作業効率低下・操縦者の疲労などの悪影響が発生することが知られており、遠隔操作ロボットの高度化により実用性が高まる反面、遅延による影響が無視できなくなってきています。遅延の発生原因は、通信時間だけでなく、カメラやディスプレイ・サーボなどの動作や、これらの制御にも時間が必要となるため、低遅延なシステムを用い、ごく近距離で遠隔操作を行った場合でも、往復(カメラへの入射から操縦者への画面表示までの遅延時間と、操縦者の操作からアクチュエータの動作までの遅延時間合計)で100 ms以上の遅延が発生し、カメラやディスプレイ・サーボなどの動作原理から、遅延時間そのものを大きく削減することは困難です。
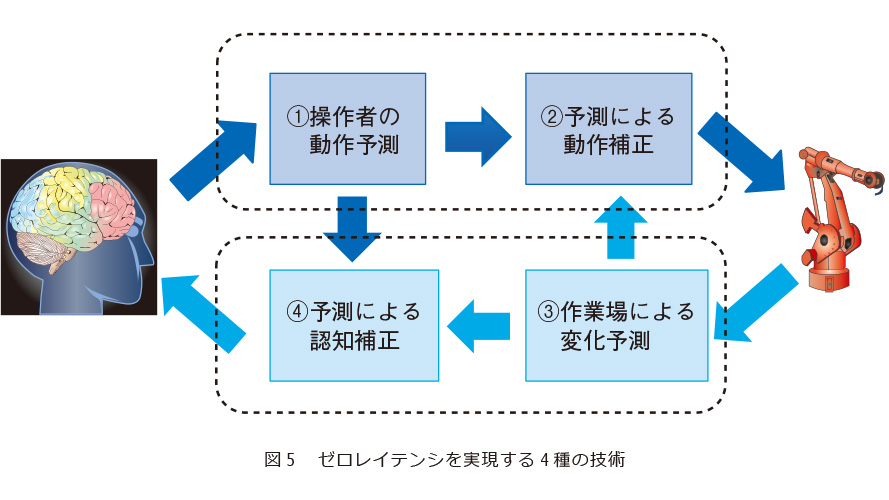
このことから、本研究では操縦者の動作予測・作業場所の物理変化予測・ロボットの動作補正・操縦者の認知補正の4種の技術により、操縦者に遅延を感じさせないことにより遅延による悪影響を解消し、操縦者の能力を完全に発揮可能な遠隔操作システムの実現をめざしています(図5)。
操縦者の動作予測とロボットの動作補正の一例としては、作業者の数100 ms先の未来の動作を予測し、その予測結果に基づいて操作者が動作を行う前にロボットを動作させることにより、遅延による影響を軽減します(図6)。ロボットの動作が操作者の意図しない間違えた動作となる可能性もあるため、現在は作業内容や物体の動きから作業者の意図を推定することで予測精度を向上する研究を進めています。
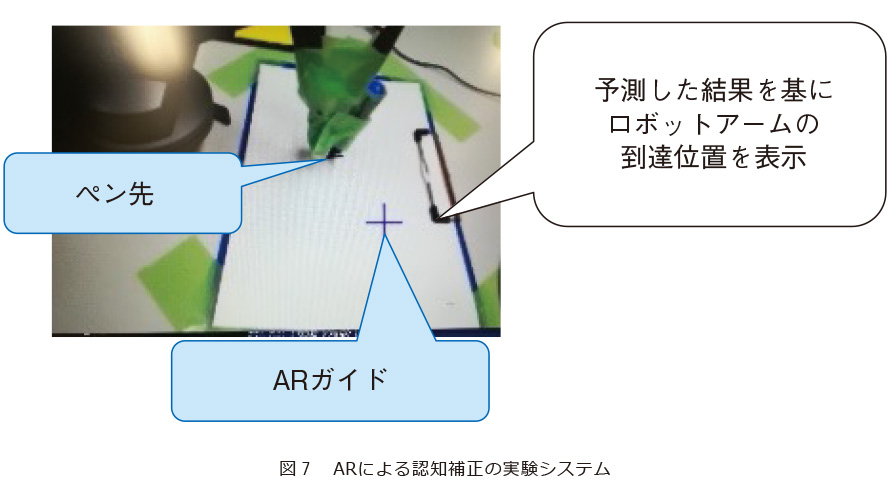
作業場所の物理変化予測とロボットの動作補正の一例としては、作業者の動作によりロボットがどのような動きを行うかロボットの物理構造からシミュレーションを行い、シミュレーション結果をAR(Augmented Reality)等によって作業者へ提示することにより、実際にロボットが動作する前に操縦者がロボットの動作結果を認識可能とし、遅延による影響を軽減させています(図7)。操縦者はARによる予測情報という直接作業する場合とは異なる情報を基に作業を行うこととなるため、現在は各種作業において、どのような情報をどのように提示すれば、より効果的に操縦者の支援が可能であるか研究を進めています。

今後の展望
現在は前述のように運動支援・知識と動作の関係性・ロボットとのインタラクションの個別技術について洗練していますが、将来的には、これらの技術を組み合わせ、特に人間らしい柔軟なサポートが重要視される業界に対して、一気通貫で技術を提供できるよう検討を進めていきます。
(上段左から)青野 裕司/瀬下 仁志/松村 成宗
(下段左から)小池 幸生/松村 誠明





体を動かすことが健康の秘訣である、とよく言われます。本技術によって、誰もが自分に合った体の動かし方・使い方が分かり、ひいては社会全体がより健康でアクティブになる、そんな未来の実現をめざし、研究開発を進めていきます。