2024年8月号
from NTTコムウェア
NTTコムウェアが推進するCPS powered by IOWNの取り組み
NTTコムウェアIOWN推進部では、CPS(Cyber-Physical System)についてデジタルツインやAPN(All-Photonics Network)等IOWN(Innovative Optical and Wireless Network)の技術要素とロボットを組み合わせ、市場ニーズにこたえる新たなソリューション創出に取り組んでいます。NTTコムウェアのプロダクトを活用して実証を進めるCPSに加えAPN等のネットワークも含めたインテグレーションを行うことで、ソリューションとして相乗効果や新たな価値を生み出しながら、データセンタやスマートシティ等の分野における新技術の実用化を進めています。
はじめに
現実空間の情報を基にデジタル空間にデジタルツインとして再現し、分析・予測・最適化等により、新しい価値を創出する仕組みをCPS(Cyber-Physical System)といいます。
CPSの“Cyber”の実現にあたっては、IoT(Internet of Things)技術の発展に伴い、現実空間のさまざまな情報をデータとして集積し、デジタル空間(サイバー空間)に再現することが可能となりました。デジタルツインではデータから空間を再現するため、人間では視認が難しい情報も同時に可視化でき、状態を視覚的に俯瞰でとらえながら、具体的なデータをとおして分析・予測シミュレーション結果を得ることができます。
また、CPSの“Physical”への打ち手として、人手不足に呼応するかのようにロボティクスの実用化も進んでいます。さまざまな業界・分野で生産性向上や作業品質の安定、危険な労働環境における作業員の安全確保といった効果を期待して、ロボティクス導入に向けた動きが活発化しています。
こうしたデジタルツインやロボティクス技術の向上と並行し、NTTグループでIOWN(Innovative Optical and Wireless Network)1.0サービスのAPN(All-Photonics Network)が商用提供されました。そして、今、その活用とともにシステムの自律的な最適化をめざすCognitive Foundationの検討も進んでいます。
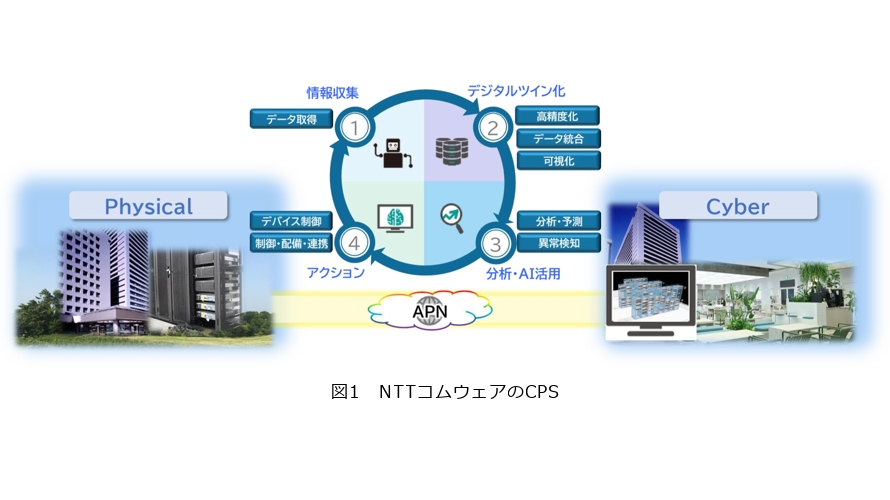
NTTコムウェアは、Cyberを表現するデジタルツインを実行するサーバと、Physicalの制御を担うロボットが動作するデータセンタをAPNでつなぎ、その低遅延・大容量のネットワークを活かしてさまざまな実証実験を行ってきました。ロボットを制御するコンピューティングリソースをPhysicalからCyberへディスアグリゲート(分散、最適化)することで、Physicalだけではできなかった新たなサービス創出に挑戦しています。また、これまで培ったネットワークオペレーションシステム技術を活用し、デジタルツインやロボット制御におけるオーケストレーションを実現、省人化を図る循環型の自律オペレーションに向けてCPSに取り組んでいます(図1)。
CPS powered by IOWNの取り組み
NTTコムウェアでは、品川―五反田間をAPNでつないで2022年12月にIOWNテストベッド(検証環境)を構築してから、さまざまなユースケースに取り組んでいます。APNの光心線長は約30km、往復で60kmの距離でも遅延が0.2ms程度であるネットワーク環境で低遅延を体感できる多くのコンテンツを紹介しています。NTTグループ内外の多数のお客さまに足を運んでいただき、お客さまの業務におけるCPSやIOWN技術の活用に関しディスカッションを重ねながら、お客さまのユースケース実現に必要な新技術の実用化に向け検討を進めています。
APNのネットワーク環境はリアルタイム性が担保され、映像等大容量データについてもトラフィックの集中により発生する遅延を気にせず通信できる特長があり、デジタル空間においては距離を意識せず、まるで隣接しているかのように通信が可能です。そのため、実業務を行うロボットを複数の遠隔地に配備していても、ロボットを制御する司令塔となるデジタルツインやAI(人工知能)をセンタに設置することでデータ集積・分析・シミュレーションの処理を遅延なく集約でき、一元的かつ効率的な運営が可能となります。私たちはそうしたIOWN技術の導入・運用を見据えた実証を行っています。
ここでは実証の技術要素を①デジタルツイン可視化、②ロボティクス制御、③高品質・大容量・低遅延活用に向けての3つの観点で紹介します。
■①デジタルツイン可視化
私たちが提供するデジタルツインは、時間軸を含めて空間を4Dで可視化するとともに、ロボット管制システムとしての役割も担っています。ロボットによるリアルタイムの収集データを含む蓄積データを活用し、分析・シミュレーションを行うことで、現実空間を容易に把握できるように視覚化します。
まず3D化には2つのアプローチがあります。1つは、「設計図面データや実測値に基づいて初期描画するアプローチ」、そしてもう1つが、「LiDARカメラからリアルタイムでデジタルツイン化を行うアプローチ」ですが、私たちは双方を組み合わせて利用しています。建物の原寸に基づいた描画を行うことで、ロボットの走行やオペレーションの正確な制御を実現させています。またLiDARカメラからリアルタイムで状況を再現させることにより、建物や設備に暫定的に置かれた物や人の動き等を把握します。
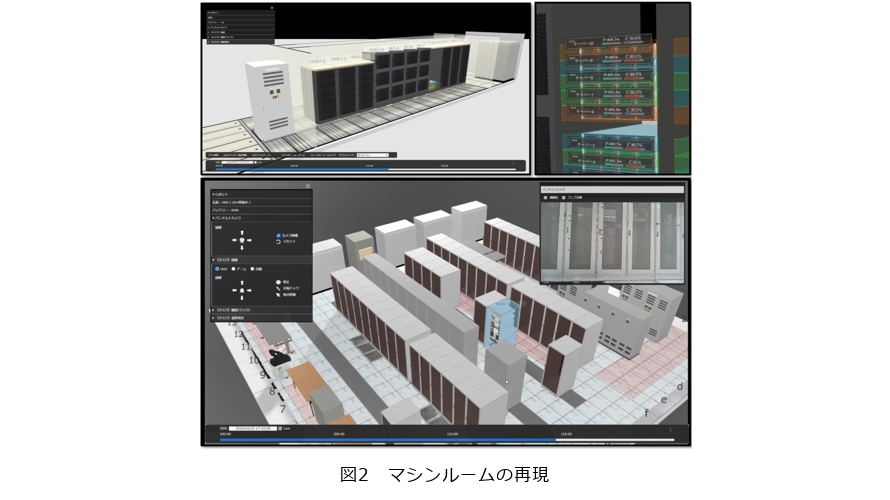
デジタルツイン上でリアルに再現された環境に人流や温度等の視認が難しいデータをマッピングさせ、マーケティングや建物の管理・運営に役立てるなど、目的に応じた可視化を実現しています。例えば、工場等の設備では、ロボットの自動走行によるメーター点検など、設備機器の巡回監視結果を蓄積することができます。また、催事場のイベントでは展示スペースにおける導線設計への活用、データセンタではサーバ稼動状態などの設備管理や温度点検によるフロアの正常性確認にデジタルツインを用いています(図2)。
私たちはデジタルツイン化に「4DVIZ®」(フォーディービズ)という自社プロダクトを用いています。「4DVIZ」は、その名のとおり時間軸を含めた4次元で状況を可視化するものです。リアルタイムで現実空間の状況を把握するだけではなく、指定した時点での状況や経過推移を理解でき、過去の履歴から未来予測のシミュレーション結果表示までを可能にします。
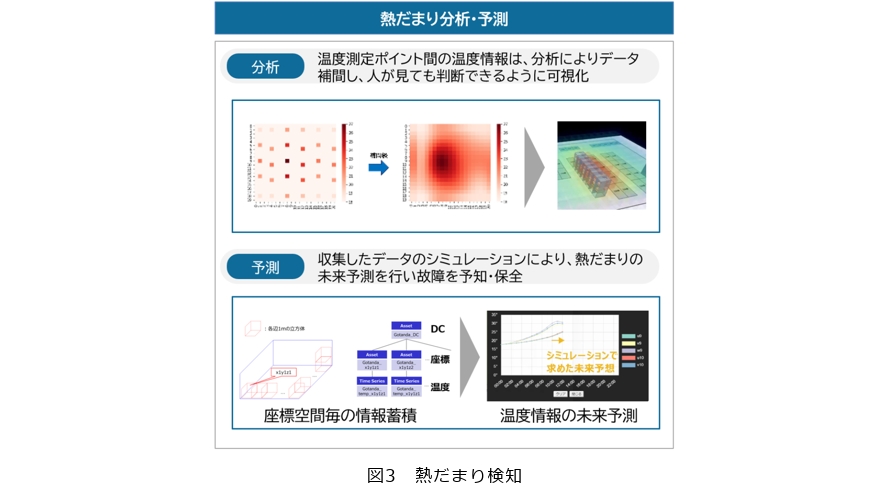
具体的な取り組みとしてデータセンタの温度管理があります。データセンタで人手作業を費やす問題の1つに温度異常があります。システムの急激な負荷増大によりサーバが過熱し、当該システムのみならず周辺ラックにまで温度上昇をもたらすため、設備空調以外を用いてワークアラウンド(一時的な対応)の措置を行うこともある事象です。
私たちはデータセンタにセンサを付けたロボットを自動走行させ、フロアの温度状態を定点観測して座標軸と温度をデジタルツインに蓄積しています。そのデジタルツイン上で座標軸と温度のデータから空間の温度状態を補間し、空間全体の温度状態を視覚化、正常な温度状態のラックや高温状態となっているラック範囲の特定を行います。また、温度状態の遷移から熱だまりが発生する可能性を予測し、未然に防ぐことにつなげています(図3)。
デジタルツインで収集するデータ分析については、蓄積データのシミュレーションだけでなく、リアルタイムでのカメラ映像のストリーミング解析も行っています。データセンタ活用事例としては、ロボットによるサーバ機器の点検における機種確認やそれに応じたランプ状態の解析があります。まずロボットアームのカメラでサーバ機器を順に映し出し、デジタルツインへ送信されたストリーミング映像の画像解析を行い、棚卸や正常性確認の結果を蓄積します。また、製造工場での製品不具合など、より高度な画像解析が必要な場面においては、画像認識AIと連携させて、設備や製品のAI判定結果をデジタルツインへと蓄積し、データ活用ができます。
■②ロボティクス制御
CPSにおいてAPNの価値を最大活用できるのがロボットのオペレーションです。人手の作業を代替し自動化する仕組みとしてロボットは大変便利ですが、安全性をどのように担保するかが極めて重要です。通常、ロボットには衝突回避用のセンサがあり自動停止等は可能ですが、より高度な制御を行うには、ロボットの本体位置だけではなく、各部品位置なども含めた複数要素を考慮する必要があります。例えば、ロボットがアームを用いた業務を行う場合、アームが周囲と衝突し、破損等を引き起こさないように制御する必要があります。私たちはロボットが動作を行う際にデジタルツイン上で周辺と衝突しないかといったシミュレーションを行い、衝突の危険性がある場合は緊急停止するなどのAPNの低遅延を活かしたリアルタイム制御ができます。ロボット自体に本体位置だけではなく部品も含めた衝突回避を施すには、各部品に複数のセンサを取り付けるか、もしくは同様の衝突回避制御のプログラムをロボット環境に整備する必要があります。制御対象ロボットの台数が増えるほど、また、制御プログラムの複雑化やプログラム制御条件の更新頻度が増加するほど、負担の大きなロボティクス運用となります。このようなロボットの制御機構をAPNの活用によりデジタルツイン側へディスアグリゲートすることで、インテント(運用者の意図)に応じたさまざまな制御機能のオーケストレーションの実現につながっていきます。
また、ロボットは定型作業をプログラム実行させることが多く、私たちのCPSではデジタルツインのロボット管制において、プログラム制御とマニュアル制御の2つのモードを切り替えて提供しています。ロボットを遠隔からマニュアルで操作する場合、通常のネットワークだとどうしても数秒の遅延が発生し、作業が精緻であればあるほど操作とロボットカメラ映像のラグが作業者のストレスとなり、平易に作業を行えません。APNの低レイテンシ(低遅延)ネットワークでは、遠隔地のロボットをデジタルツインの3D映像で確認しながら、目の前で動かしているかのようにスムーズに操作することができます(図4)。

■③高品質・大容量・低遅延の活用に向けて
APNは映像等の大容量通信をリアルタイムに行うことができるため、プラント等の設備をロボットとAIで自動点検する実証実験にも取り組んでいます。ロボットのアームに4Kカメラを取り付け高解像度の映像を遠隔のセンタに送り、AIでひび割れ等の検知を行い、デジタルツイン上のマップに異常個所を表示する取り組みです。AIでの異常検知では高解像度の映像が望ましいですが、AI等のシステムをセンタに集中させ、プラント等の拠点にロボットとカメラのみを配備して一元的な点検業務の形態をとることでシステム投資のTCO(Total Cost of Ownership)も適正化することが可能となります。
またAPNは低遅延なネットワークですが、エンド・ツー・エンドでの通信をすべてAPNで接続することはできません。建物内に配備され自由に動き回るロボットとの接続は無線通信で行う必要性があり、現状では多くの環境においてWi-Fi(IEEE802.11)が利用されています。しかし、高精細なビデオ映像をリアルタイムにストリーム転送を行う場合、Wi-Fi接続では、多くの目的で周波数帯が共用されていることに起因する干渉の影響やCSMA/CA (Carrier Sense Multiple Access/Collision Avoidance)をベースとする通信方式により、各エンドポイントでは通信速度の揺らぎや遅延が発生してしまいます。
私たちは無線通信の中で容量の大きいミリ波に着目しています。APNの低レイテンシを活かせるよう、APNによる光通信とミリ波による無線通信を相互接続し、ロボットからの高精細映像のリアルタイムストリーミング転送、遅延のないダイレクトな操作感でのロボットの遠隔操縦、デジタルツインとロボットの双方向でのリアルタイム同期など、ミリ波+APNによる広帯域・低遅延環境での検証に取り組んでいます。
OSSの開発・運用実績を活かしたトータルインテグレーション
NTTコムウェアはNTTグループのネットワークサービスを支えるOSS(Operation Support System)開発・運用の実績を持っています。ネットワークサービス提供のための業務全体をとらえ、業務プロセスを最適化するためのワークフローやオーケストレーション機能を提供しており、システムやネットワークを含む一連の業務をトータルでインテグレーションしてきた強みがあります。
またNTTコムウェアはネットワークのオーケストレーションだけではなく、コンピューティングリソースの制御にも取り組んできました。2019年にはラスベガス市のスマートシティ案件においてCognitive Foundationのマルチオーケストレータの開発・サービス提供者として参画し、サービスのオーケストレーションも実現しました。現在も、SmartCloud Orchestrator®(スマートクラウドオーケストレータ)として、国内のスマートシティサービス展開や海外の防災関連システム構築においてクラウドリソースを制御するなど、活用範囲を広げています。OSSソリューションとして、テレコム分野をはじめ、エンタープライズのさまざまな分野においてもネットワークとコンピューティングリソースのオーケストレーションの自動・自律化を実現するべく取り組みを進めています。
今後の展望
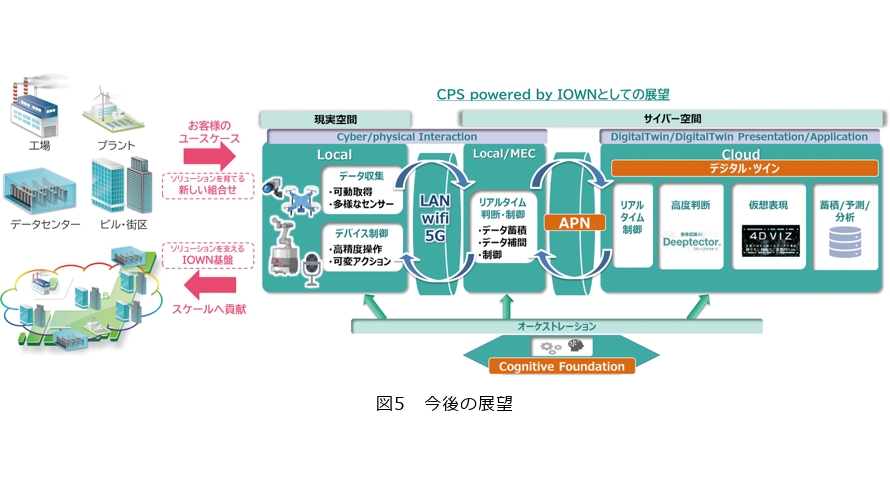
私たちは、CPS、および、APNやCognitive FoundationなどのIOWN要素技術をデータセンタやスマートシティ等の分野のニーズと組み合わせ、「省人化・無人化の実現」および「未来予測・予兆検知と自律オペレーション」といったソリューションの高度化に取り組んでいきます。
現在自社のスマートシティ向けソリューションGreenUs®(グリナス)とも連携し、街区における新しいビル運営の実現に向けて検討を重ねています。また、画像認識AIのDeeptector®(ディープテクター)と連携し、製造業における設備保全業務のサポート等のユースケースでAIとデジタルツイン連携による相乗効果を生み出していくことをめざして検討を進めています。ビルや街区、工場やデータセンタ等へのCPSによるサービス展開・拡大を、APNやCognitive Foundationといった技術で支えることにより、遠距離間でのリアルタイム性担保や効率的なスケールを実現、NTTグループでめざす事業拡大に貢献し、企業価値を高めていきたいと考えています(図5~7)。