2026年2月号
from NTTドコモソリューションズ
風力発電所のバードストライク対策AIシステム
再生可能エネルギーの1つである風力発電事業では、飛来する鳥の風車ブレードへの衝突(バードストライク)が野生生物保全と風力発電推進の両立をめざすうえで課題となっています。周辺の自然環境との調和とともに社会インフラを維持することが重要視される中で、その対策が求められています。NTTドコモソリューションズはAI(人工知能)活用による「バードストライク対策AIシステム」(広角カメラで遠方の鳥を検出、PTZカメラで追尾拡大撮影、AIで鳥種を画像判定するシステム)を開発し、風力発電事業者と共に各地のフィールドで実証を行っています。本稿ではこのシステムの必要性と技術について解説します。
バードストライク対策について
風力発電の適地は自然豊かな地域が多く、飛来する鳥も多岐にわたります。いつどのような鳥が、どのような飛翔経路をとるのかを把握し適切な対策を立てることは、自然環境への配慮のためにも重要です。脱炭素と生物多様性を両立するため、多くの知見と最新の技術を融合したソリューションが求められています。NTTドコモソリューションズでは、風力発電の事業運営において適切な対策を可能とするために、鳥類飛来を監視・画像分析・データ活用を行う「バードストライク対策AIシステム」を提供しています。
NTTドコモソリューションズの「バードストライク対策AIシステム」の構成
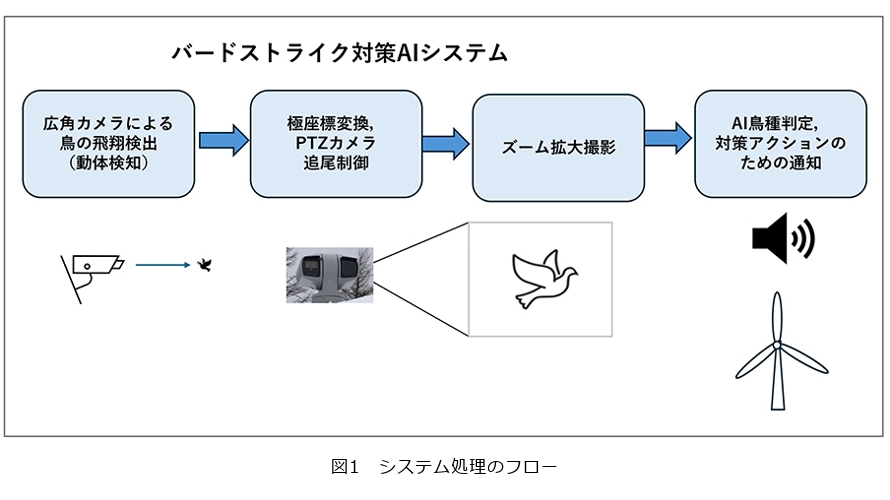
「バードストライク対策AIシステム」の構成としては、遠方で飛翔する鳥の検出、拡大撮影、鳥種判定、衝突防止対策という流れとなります(図1)。
遠方で飛翔する鳥の検出として、理想的には1km以上先の鳥を検出し、衝突コースにないかを自動判定することになりますが、これには光学の広角カメラや、船舶用の電波レーダが使われることが多く、それぞれメリット、デメリットがあります。それに関しては後述しますが、現在、NTTドコモソリューションズでは光学カメラを使用して鳥の検出を行っています(図2)。
拡大撮影では超望遠のPTZカメラ*1が使われることが多く、このカメラではパン、チルト、ズームを制御し、カメラの向きを調整し、飛翔体を追跡、追尾し、拡大撮影を行います。
鳥種判定では、飛来した鳥がどのような種類の鳥かを判定します。拡大撮影画像からDeepLearningなど画像認識AI(人工知能)で判定します。本システムでは後述するマルチモーダルAIにより、複数のAIを組み合わせ、より精度の高い判定を行います。AI鳥種判定の後は、検知した情報を基にオペレータに通知して対策アクションを促します。
*1 PTZカメラ:パン、チルト、ズームの制御ができるカメラ。

光学カメラと電波レーダによる検出システムの比較
■光学カメラによる検出システム
広角カメラで広い視野をカバーしようとすると遠方での解像度が不足します。視野角を60~90度にすると、これは一般的な広角カメラの画角の中では狭い方ですが、それでも700~800 m離れた鳥のサイズは撮影画面上で数ピクセルの黒い点になってしまい、鳥の飛翔と判定するのは非常に困難となります。また、天候(霧、ガス)や日照(照度不足)の影響も受けると、遠距離での認識はさらに困難なものになります。これにはカメラの複数設置化による視野の分割、分担や、撮像素子の解像度アップ(4K、8K化)で対応する必要があります。光学カメラのメリットとしては機材の価格が、電波レーダなどに比べて比較的安価ということがあげられます。
■電波レーダによる検出システム
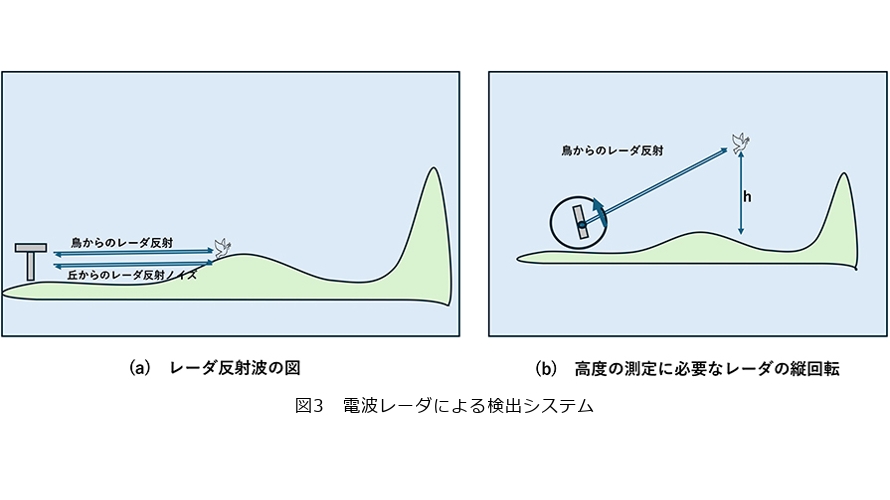
電波レーダでは水平方向360度全周で鳥を検出できますが、丘陵地などで地面からの電波反射ノイズを考慮すると、仰角が低い水平線方向の監視は非常に困難です。これは水平方向へレーダ電波を発射すると丘など大地からの反射波に鳥の反射波が埋もれてしまい鳥を検出することができないからです。よって、水平線近くで低高度を飛ぶ鳥は発見しにくくなります。
また、カメラで見るのと違い、1台のレーダでは水平方向と同時に縦方向(垂直方向)にアンテナを回転させることができず、飛んでいる鳥の高度を計測することができません(図3)。カメラではY軸方向の位置で高さが分かります。
しかし、レーダは上空においては天候や日照の影響を受けずに2~3kmの距離を見通せる大きなメリットがあります。
レーダでもっとも課題となるのは電波使用に関する手続きです。船舶用レーダを陸上で使うためには、サイトごとに無線局の免許申請、許可が必要になるうえ、無線従事者資格を持った人員を用意、配置する必要があります。さらに他の電波施設との関係で、電波を放出する方向に規制を受けることもあります。また、レーダ機器の設備コストは一般的に非常に高価なものとなります。
これらのことから光学カメラシステムの方が使いやすく、メリットが大きいことが推測されます*2。
NTTドコモソリューションズの「バードストライク対策AIシステム」では光学的な広角カメラとPTZカメラによる追尾拡大撮影部を持ち、AIによる鳥種判定を行っています。システム各部についてさらに詳細に説明します。
*2 NTTドコモソリューションズでは今後、両方式を比較検証予定。
広角カメラによる移動体検知とPTZカメラによる追尾拡大撮影
■極座標変換による追尾誤差の最小化
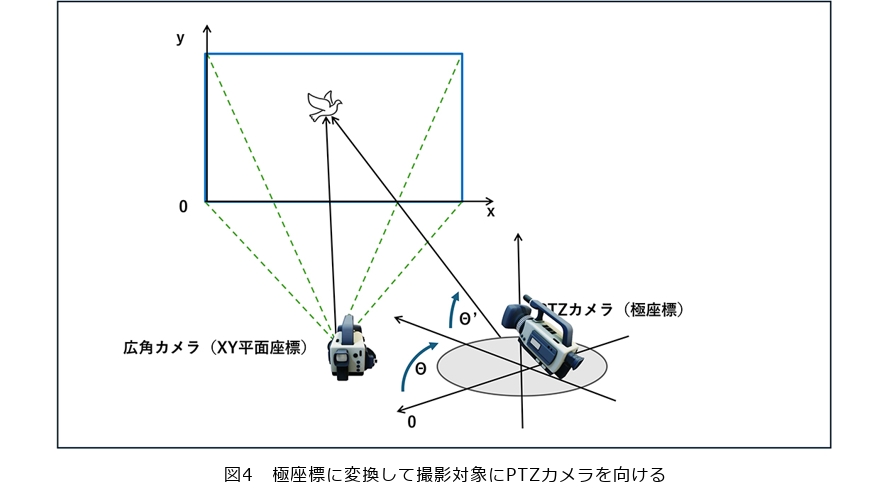
本システムでは広角カメラで見た遠方のXY平面画像上の視線方向を極座標に変換し、PTZカメラを向けますが、これには事前の校正(機器やシステム自体の微調整)が大切で、正確に追尾できるよう、カメラ設置当初に各座標の位置合わせを行う必要があります(光軸の調整)。これには、遠方にマーカーとなるものを置き、両カメラ視線方向の位置合わせを行う方法と、遠方景色の特徴点を使いコンピュータビジョン上で正確に位置合わせを行う方法があります。いずれの方式でも、正確に座標位置(光軸)を合わせて校正する必要があります(図4)。
■動体検出、追尾
追尾ではまず、広角カメラで遠方の鳥を認識しますが、この撮影画像上では数ピクセルの点にしか見えません。この状態ではAI認識を行うことはできないため、AIによる鳥種判定は拡大撮影した後に拡大した画像に対して行うことになります。
この数ピクセルにしかならない動く点を画像処理の動体検知技術で識別し、その方向にPTZカメラを制御しながら向けます。
■移動方向予測と拡大撮影タイミング
PTZカメラを移動体方向に向ける場合、制御のタイムラグが発生するため、ある程度、移動体が動く方向を予測しながらカメラを向けることになります。
また、ズームによる拡大撮影では、いきなりズーム倍率を高倍率に上げると視野が狭くなり、対象の鳥が撮影視野の範囲から外れ見逃す危険があるため、段階的にズームアップ撮影していく戦略をとっています。こうすることで、拡大画像時の撮り損じを抑えています(図5)。
鳥種識別のため、ズーム倍率が大きいにこしたことはありませんが、あまり大きくしすぎるとフレームアウトするため、適切な頃合いで段階的に拡大ズームし撮影することが重要です。

■複数の鳥飛翔における撮影優先順位
PTZカメラ設置が1台の場合、複数の鳥が飛翔しているときには優先順位をつけ、どの鳥から追尾するか決める必要があります。
これには、風車により近く、より接近する可能性が高いものを推測し、優先順位を決め、順に追尾撮影を行います。
各種課題と対策
■動体検知における各種誤認識対策(認識し、あらかじめ追尾対象から外すなど)
動体検知ではさまざまな「動くもの」が誤認識のノイズとなります。これには、虫、雪、雲、草木の揺れなどがあります。検出対象の鳥が撮影画像上数ピクセルしかないため、いかに誤認識のノイズを減らすかが検出精度向上の鍵となります。
① 昆虫:山間部の風車設置サイトでは、特に夏になるとトンボなどの昆虫が多く発生することがあり、この誤認識対策は必須です。
② 雪:降雪地帯では、冬場に空中を舞う雪の誤認識対策が必須です。
③ 雲:空を流れる雲も、風が強い日は動きが速く、誤認識対策が必要となります。これには、雲を個別に認識判断し除外しています。
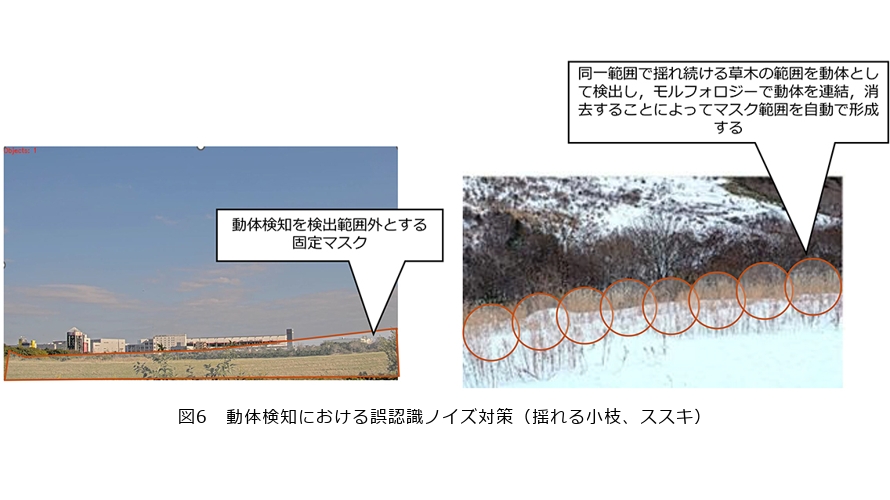
④ 植物(草木):特に山間部や丘陵地帯に風車が設置されている場合は、ススキや木の小枝など風で揺れる植物が動体誤検出のノイズとなります。事前に草むらエリアを認識対象外として画像上マスクしておくか、常に揺れている枝葉部分を画像処理技術でまとめて領域化し、その領域部分を自動的にマスクし、取り除くことを行っています(図6)。
■山間部の背景における移動体認識の難しさ
青空背景であれば、移動体の検出は比較的容易ですが、山間部などで背景が樹木の場合は移動体検出の難易度は上がります。
動画全フレームで、毎回AI認識処理を使えればよいですが、処理が重く、処理速度が問題となります。また、そもそも検出対象が数ピクセルしかないのでAI認識には適しません。
そういった理由から、海外製品など他社製品では、青空背景限定の製品もあります。NTTドコモソリューションズの「バードストライク対策AIシステム」では、日本では多い山背景の鳥検出も対応可能です。
■マルチモーダルAIによる鳥種判定
複数のAIを組み合わせた鳥種判定。本システムでは、広角カメラの点サイズの鳥の飛翔識別AI、ノイズとなる鳥以外の物体の判定Al、レーダ画像上の鳥識別AI、PTZカメラの鳥拡大画像による鳥種判定AI、鳥の飛翔パターンによる鳥種判定AIなど、複数のAIを組み合わせて鳥種の判定を行っています。複数のAIを組み合わせることで、より精度の高い鳥種判定識別を行うことができます。
■風車サイトの広大さに関する課題
風車は山間部や、丘陵地帯の広大な範囲に設置されています。広大な視野や、見通し距離をカバーするには広角カメラを複数台設置するなどして、視野範囲やゾーンを分割分担する必要があります。これは通常の防犯監視カメラ設置と同様の考え方です。
■通信インフラ・電源整備の課題
山間部の風車サイトでは携帯通信の電波が十分でないところが多くあります。衛星通信も考えられますが、麓の管理サイトと大量の映像をやり取りする必要があるため、光ファイバ設置が理想的です。ただし、ケーブル設置においてはコスト的な課題があります。
また、電源の確保も課題です。風車の根本付近には電源が確保されていますが、風車から離れたところに監視カメラを置く場合は、電源を延長する必要があります。
■洋上風力発電サイトにおける課題
洋上では人による監視が非常に困難です。また、監視カメラの自由な設置も困難なため、風車が設置されている洋上プラットフォームから、自風車に向かって来る鳥を監視する、もしくは隣接した洋上プラットフォーム(風車が立っている)周辺を飛んでいる鳥を監視することになります。プラットフォーム間の距離はおおよそ一定ですが、撮影距離を考慮してカメラの配置設計をする必要があります。
山間部などの陸上とは逆に、洋上では電波法の申請や許可のハードルが下がります。また、丘陵地などからの反射がないため見通せる距離も長くなり、複数の風車を1台のレーダでカバーできる可能性もあると考えます。
また、洋上では、飛んでいる鳥の種類も飛翔の特徴も異なりますので、洋上特有の工夫が必要となります。
本システムの検証実験は野鳥保護の公園や、干潟周辺、実際の風力発電サイトなどで行っています。
まとめ
このように「バードストライク対策AIシステム」では、実践的な課題に対してさまざまな改善や工夫をしながら機能を高度化しています。
NTTドコモソリューションズでは、鳥類保護、生物多様性保護を実現するため、このシステムをさらに進化させ、実用化を進めていきます。また、このシステムは風力発電業界だけでなく、鳥類生態系モニタリングによる環境アセスメントや空港でのバードストライク対策やドローン飛行検知等、他業界にも活用が可能です。
実際に2025年度、NTTドコモの無線基地局周辺での鳥類モニタリングにおいても利用実績があります。基地局周辺に本システムを設置し、拡大撮影画像を自動取得し、鳥類専門家の判定知見も借りながら、基地局周辺に生息している鳥種の統計を取得する共同実証を行いました。
企業として、ネイチャーポジティブ(生物多様性の維持・回復)の取り組みは重要でかつ喫緊の課題です。NTTドコモソリューションズでは、長年培ってきたAI技術をネイチャーポジティブへ適用・発展させる取り組みを今後も推進していきます。