2024年10月号
特集
ミッションクリティカルなCPSサービス収容に向けた協調型インフラ基盤
- 協調型インフラ基盤
- Cyber-Physical Systems
- 自動運転遠隔監視
本稿では、人口減少等に起因する各種社会課題の解決に期待される、CPS(Cyber-Physical Systems)サービスの社会実装促進に寄与する基盤として研究開発を進めている「協調型インフラ基盤」について紹介します。コンセプトと全体アーキテクチャに加え、CPSサービスのユースケースの1つであるレベル4自動運転の遠隔監視に求められるミッションクリティカルな映像伝送に資する要素技術と、それらを組み合わせた実フィールドでの実証の模様について紹介します。
東 信博(あずま のぶひろ)/小野 孝太郎(おの こうたろう)
鍔木 拓磨(つばき たくま)/河野 太一(かわの たいち)
東條 琢也(とうじょう たくや)/桑原 健(くわはら たけし)
NTTネットワークサービスシステム研究所
Cyber-Physical Systemsの社会実装に向けて
近年の5G(第5世代移動通信システム)、6G(第6世代移動通信システム)等に代表される情報通信技術の進展に伴い、これまでは困難であったCPS(Cyber-Physical Systems)の実現が期待されています。CPSはサイバー空間と物理空間の間の緊密な連携により、物理空間の多種多様なデータを収集(センシング)し、収集したデータを基にサイバー空間において各種分析を行い、その結果を基に物理空間に対して制御指示などの働きかけ(アクチュエーション)を行うものです。
CPSサービスの例として、車両(乗用車、物流トラック、農機等)の自動運転やその遠隔監視、スマートシティ、スマートファクトリーなど、さまざまなものが挙げられます。
少子高齢化に伴う労働力人口減少による人手不足に対する省力化の手段として、さらには、収集・蓄積されるデータを基にした高度な分析による全体最適化や生産性・付加価値向上を実現するための手段として、大きな期待が寄せられています。
CPSサービスは従来のWebアプリケーションなどとは大きく異なる特性を持つため、サービスを構成・収容するシステムに対する要件も大きく異なります。
例えば、CPSサービスは実世界への働きかけを行うため、失敗するとその影響が物理空間へ及びます(例:遠隔運転において、サイバー空間からの停止指示が間に合わず車両が止まりきれない可能性がある)。そのため、CPSサービスを構成する系全体で高い信頼性・リアルタイム性(処理があらかじめ定められた時間までに必ず終わること)が求められます。
また、万が一なんらかの障害等が発生した場合、それを把握し、系全体への影響を最小化するための対処を可能とする仕組みも必要です。
さらに、CPSサービスはサイバー空間と物理空間から構成される分散システムであることから、それぞれをつないでセンシング情報、アクチュエーション情報を相互にやり取りする、共通的な情報流通の仕組みが必要となります。
加えて、CPSサービスは幅広いユースケースを持つことから、系を構成する制御アプリケーション、センサ、アクチュエータも多種多様です。これらを収容し、ユースケースに応じて処理を簡易にカスタマイズ、チューニングできるような仕組みも求められます。
NTTネットワークサービスシステム研究所では、上記のCPSサービス収容における特有の要件に対応し、CPSサービスの社会実装促進に寄与する基盤技術として、「協調型インフラ基盤」の技術開発に取り組んでいます。
協調型インフラ基盤はサイバー空間と物理空間の融合・協調をめざすインクルーシブコアの早期版として研究開発を進めており、本稿では、協調型インフラ基盤の概要、およびCPSサービスのユースケースの1つであるレベル4自動運転の遠隔監視を実現するための要素技術について紹介します。
次に協調型インフラ基盤のコンセプト、全体アーキテクチャについて説明します。
協調型インフラ基盤のコンセプトとアーキテクチャ
協調型インフラ基盤は、CPSサービスを構成する要素であるデバイス側機能、情報処理(クラウド)、ネットワークを緊密に連携・協調させることで、ミッションクリティカルなCPSサービスの収容を実現する基盤です(1)。
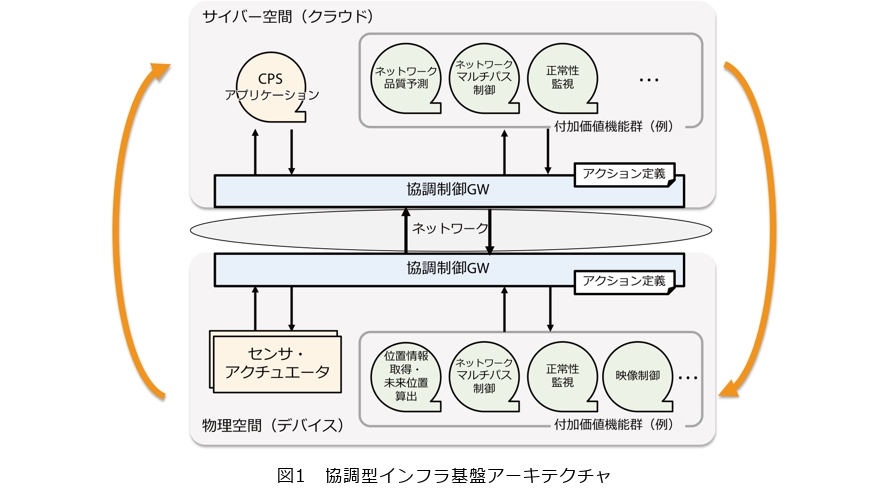
協調型インフラ基盤の全体アーキテクチャを図1に示します。物理空間(デバイス側)、サイバー空間(クラウド側)それぞれに協調制御ゲートウェイ(協調制御GW)が配置され、この協調制御GWがCPSサービスの収容に必要な機能を提供します。
協調制御GWが提供する主な機能は、①多様なコンポーネントの収容、②デバイス-クラウド間の情報流通、③付加価値機能と組み合わせた、ユースケースに応じた制御処理の柔軟なカスタマイズの3つです。
協調制御GWはロボット開発の分野でデファクトスタンダートであるROS2 (Robot Operating System 2)をベースにつくられており、ROS2ベースの多様なセンサ、アクチュエータ製品との情報のやり取りを開発レスで実現可能としています。このほか、HTTP(Hypertext Transfer Protocol)やgRPC(gRPC Remote Procedure Calls)、MQTT(Message Queuing Telemetry Transport)にも一部対応しています。
また、デバイス-クラウド間の通信も協調制御GWが担っており、デバイス側、クラウド側それぞれのコンポーネントは、特別な設定不要で広域ネットワークを介した情報流通が可能となっています。
さらに協調制御GWには、収容コンポーネントからの情報連携をトリガとして、どのようなアクションを取るかをファイルに記述できる仕組みを具備しています。これを用いることで、コンポーネント間の単純な情報流通に加えて、連携内容に応じた判断、情報の加工、処理分岐などをはじめとする各種動作を、ユースケースや環境に応じて柔軟かつ容易に定義・カスタマイズすることができます。
これらの基本機能に加えて、各コンポーネントのログなどから正常性を監視する機能や、デバイスの位置情報を取得・予測する機能など、CPSサービスを実現するうえで有用な、さまざまな付加価値機能を提供・連携可能としており、上記の動作記述の仕組みと組み合わせることで、CPSサービス提供事業者側でのつくり込みの手間を大幅に削減できます。
協調型インフラ基盤は、協調制御GWが提供するこれらの基本機能と付加価値機能を組み合わせることで、前述の特有の要件を持つCPSサービスの収容を実現します。
これまで、農機の自動走行および遠隔監視をユースケースとして、複数のアクセスネットワーク〔地域BWA(Broadband Wireless Access:地域広帯域移動無線アクセス)やキャリア5G〕を切り替えながらの円滑な広域自動走行や、ネットワーク品質の劣化検知をトリガとした安全な停止など、農機のレベル3自動走行高度化に向けたシナリオの実証を進めてきました(2)。次にユースケースをさらに拡張し、レベル4自動運転の実現に必要となる車両遠隔監視を実現するための付加価値機能となる要素技術について紹介します。
レベル4自動運転における車両遠隔監視を実現するための要素技術
ここでは、レベル4自動運転(特定条件下における完全自動運転)において求められる、車両遠隔監視を実現するための要素技術について紹介します。
レベル4自動運転の実施にあたり、車内外の映像の遠隔監視が義務化されています。しかし、高速で走行する車両からモバイル通信を行う場合、さまざまな外乱要因によってネットワークの品質は大きく変動します。これが映像の途絶や大きな劣化につながり、安定した継続監視に支障をきたします。
このような不安定な状況下でも安定した車両遠隔監視を実施できるよう、次に述べる各種要素技術を組み合わせることで、ロバスト・リアルタイムな情報流通を実現します。本稿では、マルチパスネットワーク制御技術であるマルチパス転送ゲートウェイ(MP転送GW)、ネットワーク品質推定技術であるQIM(Quality Index Map)、および映像制御技術について紹介します。
■MP転送GW
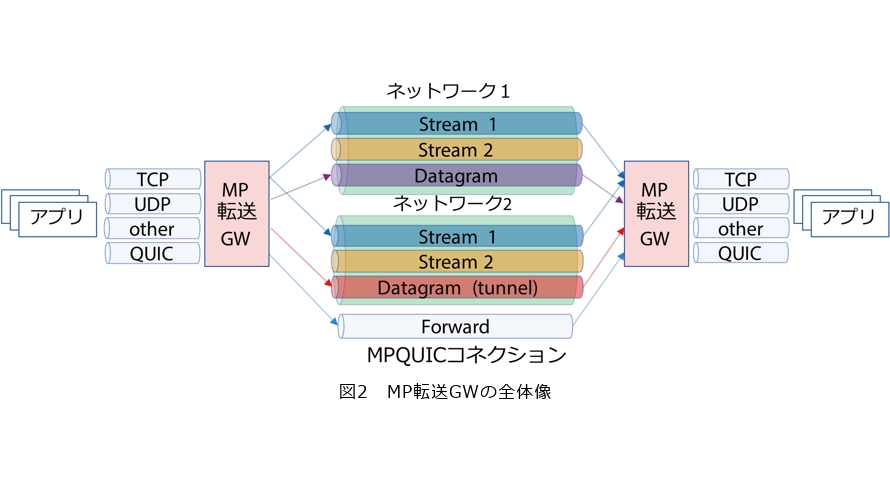
MP転送GW(4)は、デバイス・MEC(Multi-access Edge Computing)間のユーザトラフィック、および情報処理基盤の制御トラフィックの転送を担っています。MP転送GWは任意のTCP(Transmission Control Protocol)・UDP(User Datagram Protocol)・その他の通信を、標準化中の最新技術であるMPQUIC(Multipath extension for QUIC)(5)のStreamおよびDatagram frameを用いて透過的に転送します(図2)。また複数のネットワークを利用し、ネットワーク品質予測値・実測値を基にしたネットワーク選択をはじめとする、パケット伝送のためのさまざまなネットワーク制御機能を提供します。本技術により、特定のネットワークの品質が劣化した場合でも、低遅延・高信頼なパケット伝送が可能になります。
■QIM
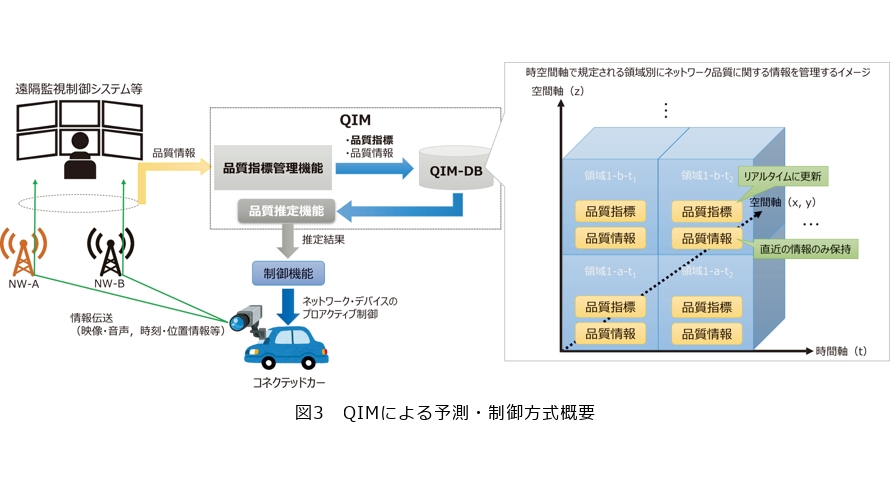
リアルタイムに品質が変動する無線アクセス区間を含むネットワークを利用した情報伝送を安定化させるためには、情報伝送に影響を及ぼすネットワーク品質の著しい劣化を事前に検知し、劣化が実際に発生する前に対処(MP転送GWにおける利用ネットワーク切替など)を行う必要があります。劣化の事前検知を実現するため、時空間軸で規定される領域別のネットワーク品質特性を確率分布で表現するQIM(3)をネットワーク品質推定技術として検討しています。QIMを含むプロアクティブ制御方式のイメージを図3に示します。QIMでは、サービス(本ユースケースの場合、車両からの映像情報)そのものの情報伝送に基づいてネットワーク品質をパッシブに計測し、品質情報を特徴量化した品質指標をリアルタイムに更新します。これにより、ネットワーク品質特性の変動に対応した、高精度なネットワーク品質推定を可能にします。
■映像制御
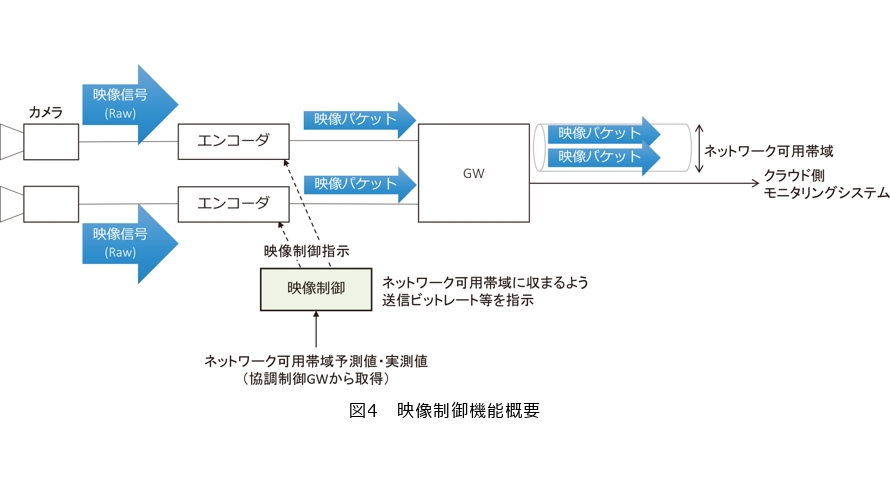
映像制御機能は、映像エンコード方法を制御することで、ネットワークの品質(可用帯域など)の変動に合わせて送出する映像データ量を増減させます。これにより、ネットワーク品質が大幅に劣化した場合にも、多少の映像品質劣化は許容しながらも、ネットワークの可用帯域を超えないよう映像データを送ることで、常に一定遅延以下での途絶のない映像伝送を実現します(図4)。
映像制御機能は、ネットワーク品質の予測値・実測値を基に、エンコードパラメータを算出する機能と、映像のエンコードを行うエンコーダに対してエンコード方法等を指示する、映像制御指示インタフェースを備えます。映像制御機能は、ネットワーク品質予測値を基に、ネットワーク品質が良好な場合は高いビットレートでの映像送信を指示します。一方、ネットワーク品質が悪く、可用帯域幅が映像送信に必要な帯域幅を下回ることが予測される場合、映像ビットレートを下げるようエンコーダに対して指示します(図4)。併せて、ネットワーク品質実測値から突発的なネットワーク品質の劣化を検知した場合、即座に映像ビットレートを下げるようエンコーダに対して指示を行います。
このように、映像制御機能はネットワーク品質の予測値・実測値を基に制御を行うことで、可能な限り映像品質は確保しつつ、車両遠隔監視に求められるリアルタイムな映像伝送を実現します。
■要素技術間の協調制御
協調型インフラ基盤は、これまで述べた各種要素技術が緊密に連携・協調することで、車両遠隔監視に求められる、リアルタイム・高信頼・低遅延な映像伝送の実現をめざします。
MP転送GWは、QIMから取得したネットワーク品質予測値と、MP転送GW自身で取得したネットワーク品質実測値を組み合わせることで、ネットワーク品質が大きく変動する環境下においても、遅延の最小化・可用帯域の最大化を両立できるようパケットごとに利用するネットワークの選択を行います。さらに、ネットワーク品質情報を映像制御機能へ連携することで、映像制御側で、その時点におけるネットワーク可用帯域幅におさまるよう映像トラフィック送出量を調整し、映像途絶・遅延増大を防ぎます。
これにより、従来のようにネットワークレイヤ、アプリケーションレイヤの機能がそれぞれ独立に動作するのではなく、異なるレイヤの機能が協調して動作できるようにすることで、安定した映像伝送系の実現を可能としています。
協調型インフラ基盤は、これらの要素技術(付加価値機能群)との連携・協調を、協調制御GWを介して汎用的に実現する手段をCPSサービス側に提供することで、さまざまなユースケースにおける制御系の実現を可能とします。
実フィールドでの検証
自動運転車両への導入に向けて、協調型インフラ基盤が自動運転の車両遠隔監視に対して効果があることを確認するため、公道で車両を走行させて検証を行っています。
検証の模様を図5に示します。車両遠隔監視を想定し、車両内部にカメラ、エンコーダと協調型インフラ基盤車両側コンポーネントを搭載し、特定のエリアを走行させます(図5(a))。車両側で取得した映像は、リアルタイムに遠隔管制システム側に伝送・投影されます(図5(b))。
検証では、協調型インフラ基盤技術が適用されていない場合、走行位置や時間帯によって頻繁な長時間途絶が発生しているところ、協調型インフラ基盤技術を適用した場合には改善されていることを確認しています。これからも継続して検証を進め、実フィールドにおける課題を抽出し、さらなる機能改善を進めています。

今後の展開
本稿では、ミッションクリティカルなCPSサービスの社会実装促進に向け取り組んでいる、協調型インフラ基盤の概要、および自動運転遠隔監視を実現するための各種要素技術および実証の状況について紹介しました。
今後は、自動運転に限らず高信頼な無線通信を必要とするさまざまなユースケース〔スマートファクトリーや、異種デバイス(ドローン等)連携・協調によるスマート農業高度化など〕への適用と、要素技術のさらなる確立を進めていきます。
■参考文献
(1) 桑原・石橋・川上・益谷・山本・安川:“ミッションクリティカルなサービス提供を可能とする協調型インフラ基盤,”NTT技術ジャーナル,Vol. 33, No. 8, pp. 29-33, 2021.
(2) 石橋・SAHA・森田・前田・河村・野口:“遠隔監視・圃場間移動可能なレベル3ロボット農機の実現に向けて,”電子情報通信学会論文誌 C, Vol. J106-C, No. 4, pp. 154-162, 2022.
(3) 小野・河野・笛木・東條:“NW品質特性を表現する確率分布に基づく品質推定方式の検討,”信学技報, Vol. 124, No. 106, NS2024-72, pp. 152-157, 2024.
(4) 岩澤・徳永・小松・東條:“V2N通信安定化に向けたMPQUICゲートウェイの提案,”信学ソ大,B-6-17, 2023.
(5) Y. Liu, Y. Ma, Q. De Coninck, O. Bonaventure, C. Huitema, and M. Kuehlewind:“Multipath Extension for QUIC,”IETF Internet-Draft draft-ietf-quic-multipath-04, March 2023.
(左から)東 信博/小野 孝太郎/鍔木 拓磨/河野 太一/東條 琢也/桑原 健





各種社会課題の解決に向けた、ミッションクリティカルなCPSサービスの社会実装を促進する基盤として、引き続き協調型インフラ基盤の研究開発を進めていきます。