2025年6月号
特集
エッジコンピューティングの品質制御技術を用いた遠隔操作によるイチゴ収穫実証
- エッジコンピューティング
- 遠隔操作
- スマート農業
現在農業において高齢化による産業人口減少が深刻化し、担い手不足が課題となっています。この課題解決にあたり、NTTグループではロボットを用いて遠隔地からの農作業実証に取り組みました。実証にあたり、エッジコンピューティングの品質を制御するネットワークコンピュート高速クローズドループ制御技術を活用し、エンド・ツー・エンドの通信品質に合わせて動作を調整する遠隔操作システムを構築しました。また、本システムの有用性を検証するために、東京にいる作業者がロボットを遠隔操作して秋田にあるイチゴを収穫する実証を行いました。
秦野 智也(はたの ともや)†1/黄 掣(こう せい)†1
梅田 果凜(うめだ かりん)†1/小林 弘高(こばやし ひろたか)†2、3
伊藤 圭(いとう けい)†2、3/緒方 勇理(おがた ゆうり)†2、3
NTTアクセスサービスシステム研究所†1
NTT東日本†2
NTTアグリテクノロジー†3
遠隔営農支援の取り組み
現在、農業において高齢化による産業人口減少が深刻化しており、基幹的農業従事者数はこの20年で半減(1)しています。このような状況で、スマート農業による担い手不足の解消、生産の安定化、食の安定供給への期待はますます高まっています。現在、スマート農業の取り組みは、センシングによるデータ駆動型農業や、露地栽培での大規模農機の自動化等が多くみられます。
NTTアグリテクノロジーは、施設園芸領域にて農業生産法人として自社での栽培・販売を行う傍ら、スマート農業を自ら活用する中で得られた知見・実績等を農業現場に即したソリューションに仕立てて、幅広く展開する取り組みも進めています。その中でも、ICTの活用により、農業の担い手や専門家の不足解消に寄与する取り組みが、「遠隔営農支援プロジェクト」です。
「遠隔営農支援プロジェクト」は、NTTグループの持つ通信のケイパビリティを核として展開するものです。遠隔営農支援は当初、「栽培指導のリモート化」を実現する取り組みとしてスタートしました。農業では、高度な栽培技術を持つ専門家が、新規就農者などに栽培指導をすることで技術普及・担い手育成がなされています。しかし、そのような専門家の人手不足により担い手を育成できず、担い手が自信を持って農業ができない、参入できないといった状況が生じています。NTTアグリテクノロジーは、こうした状況の改善に向けて、通信とスマートデバイスを組み合わせた農業分野のDX(デジタルトランスフォーメーション)となる遠隔営農支援の仕組みを構築することで、栽培指導の効率化を実現し、課題を解決しました。
「遠隔営農支援プロジェクト」は、通信分野と異なる多くの外部パートナーと共創・協業して展開しています。農業の専門家が所属する組織の拠点に、遠隔で営農指導をするために必要な情報・映像・画像を映し出す通称「コックピット」を開設し、新規就農者等がいる生産現場にデータ駆動型での遠隔指導を行うことで、効率的な指導・技術伝承を実現しています。このような取り組みを通じ、栽培指導の効率化、新規就農者の増加の両側面をめざしています。
これまでの遠隔営農支援の取り組みは、遠隔地の「人(専門家)」が生産現場の「人(新規就農者等)」を指導・指示するものでした。めざすべき未来に向けては、AI(人工知能)やロボットを遠隔営農支援に組み込み、「AI」が「人(新規就農者等)」を指導する、「人(専門家)」が「ロボット」を操作する等の取り組みに段階的な発展をさせていくことが重要です。遠隔地にいる人がAIやロボットを活用して農業に取り組めれば、データ駆動型農業によりこれまで以上に複数ファームの効率的な運営や農業経営を実現し、食の安定供給や食料自給率の維持拡大、持続的な社会の形成につながるものと考えています。計算してつくる農業・儲かる農業にして、農業を憧れの産業にしていきたいと考えています。
しかし、そのような農業を実現するには、ロボットの遠隔操作における問題を解決する必要があります。中でも、ルーラルエリアに多く分布する農業現場は通信環境の悪化が起こり得る状況にあるため、通信遅延などの通信品質がロボットの操作性の悪さや動作誤りにつながり、AIやロボットを活用したデータ駆動型農業の普及が進まず、農業分野の現状が変わらないことが危惧されます。そのため、通信品質を向上させる傍ら、通信品質をモニタリング・制御し、操作に与える悪影響を抑止して、農業現場で活用する技術が求められています。
ネットワークコンピュート高速クローズドループ制御技術
ネットワークコンピュート高速クローズドループ制御技術(2)は、ネットワークの伝送時間とエッジコンピューティングの処理時間を監視し、サービス要件に応じて遅延等の通信品質をエンド・ツー・エンドで常に低遅延・低ジッタの状態を保つことで、サービスを持続的かつ安定的に提供する技術です。本技術は、伝送時間と処理時間の収集、収集した情報の分析と、通信品質に応じた制御の3つの要素を高速に処理することと、ネットワークとエッジコンピューティングのコントローラ連携によって実現しています。
このたび、遠隔にある作物を、ロボットで収穫できるよう、農業分野向けに本技術の機能拡張を行いました。
■アプリ外からの処理時間計測
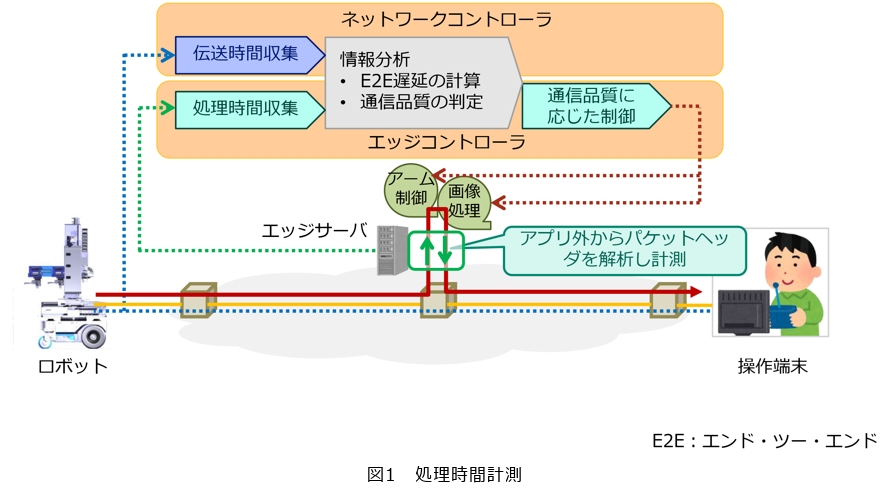
従来は、画像処理時間を計測するために、画像処理アプリに独自機能を追加し、その機能を用いてアプリと連携する必要がありました。しかし、多種の作物を収穫できるようにするためには、さまざまな画像処理アプリに対応できる必要があります。そのため、画像処理アプリに手を加えなくても、アプリ外のサーバのみで処理時間計測を行えるようにしました。本機能では、アプリの入出力データを汎用画像フレームのヘッダ特性を用いて解析し、データの通過時間から処理時間を計算することで、アプリ外からの処理時間計測を可能にしています(図1)。
■品質通知によるシステム連携
従来は、冗長構成を用意して、通信品質が性能要件を満たさない場合には別の経路とサーバ処理に切り替える制御を行っていました。しかし、農業分野への適用を考えるとよりリーズナブルな通信環境下でも通信品質に応じた制御が求められています。そこで、より汎用的な使い方として、通信品質を遠隔操作システムに通知し、システム側で制御を行う方法にしました。
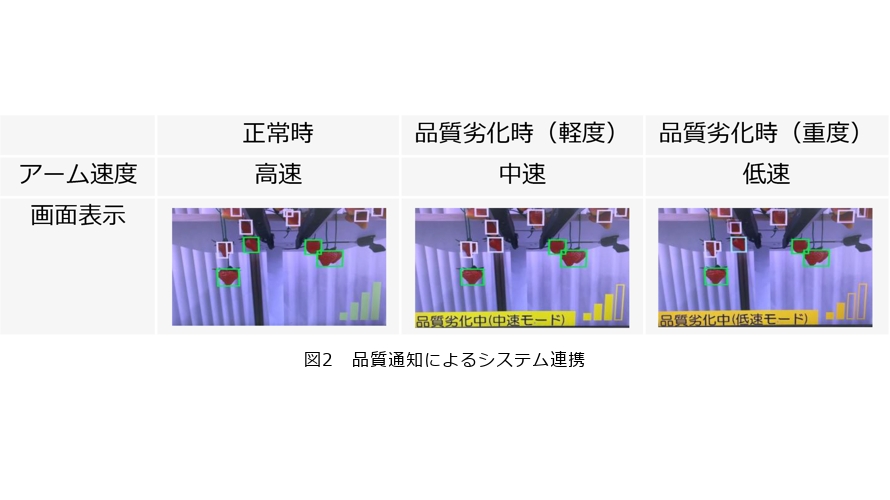
本機能では、収集した伝送時間と処理時間を基に、エンド・ツー・エンド遅延の計算をし、通信品質の判定を行い、それを遠隔操作システムに通知します。通信品質を受け取った遠隔操作システムは、ロボットから操作端末に流れる映像に通信品質を表示し、作業者にタイムリーに通知します。これにより、作業者がエンド・ツー・エンドでの通信品質状態をリアルタイムに把握できるようになります。また、操作端末からロボットに送られるアーム制御情報に対し、通信品質に応じた速度制御を行います。遅延時間が長くなり通信品質が劣化した場合には、アームを減速させます。遅延増大時は、コントローラの操作からアームの動作への反映に時間がかかり誤差が大きくなる傾向にありますが、アーム速度の調整によりその操作精度を高めることができます(図2)。
遠隔操作システムと動作シーケンス
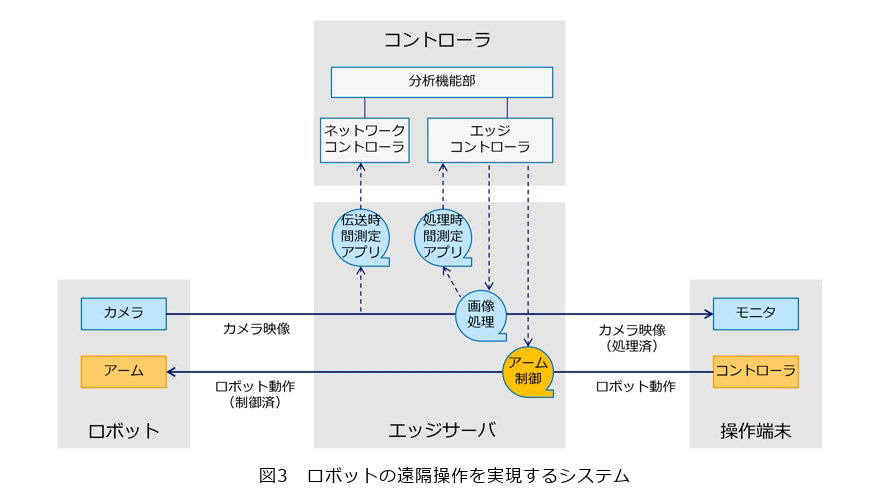
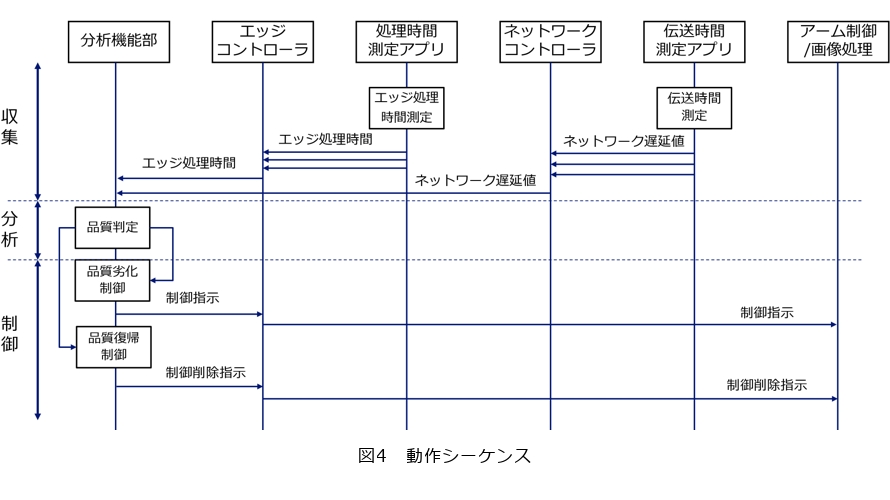
遠隔操作システムを図3に、動作シーケンスを図4に示します。遠隔操作システムは、ロボット、エッジサーバと、操作端末で構成されています。映像系として、ロボット内のカメラが撮影した映像を、エッジサーバ内の画像処理アプリで収穫可否の判別を行い、操作端末のモニタに表示します。操作系として、操作端末のコントローラを用いて、ロボットのアームを操作します。また、ネットワークコンピュート高速クローズドループ制御技術の機能である、処理時間測定アプリと伝送時間測定アプリは、エッジサーバ内に実装し、制御の根幹となるコントローラはエッジサーバに隣接して設置します。
このシステム構成において、伝送時間測定アプリは、エッジサーバとロボット間およびエッジサーバと操作端末間のネットワークの伝送時間を測定し、ネットワークコントローラに通知します。また、処理時間測定アプリは、画像処理の処理時間を測定し、エッジコントローラに通知します。分析機能部では、測定した伝送時間と処理時間を基に通信品質を判定しエッジコントローラに通知します。エッジコントローラからの通知状態を受けて、画像処理アプリおよびアーム制御アプリが、図2に示す画面表示およびアーム速度制御を実施します。
イチゴ収穫実証
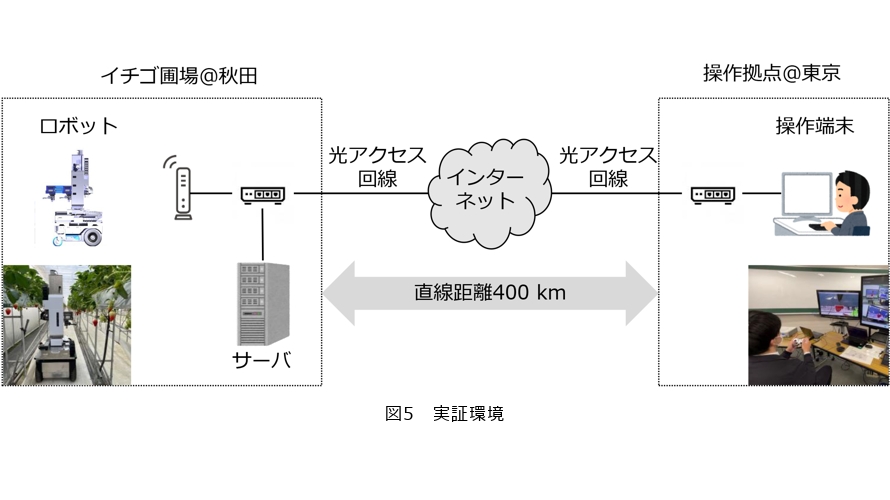
実証環境として、東京都にいる作業者が、秋田県のイチゴファームにあるロボットを遠隔操作できる環境を用意し、イチゴ収穫を行いました。
遠隔操作システム構成として、秋田県のイチゴファームにロボットと、イチゴ収穫の可否を判断する画像処理を行うサーバを、東京都の拠点に操作端末を配置しました。両拠点は直線距離で約400km離れており、光アクセス回線とインターネットを使用したネットワークで接続されています(図5)。イチゴの収穫には、収穫適期の判断と苗や作物の品質を確保した収穫作業が必要になりますが、この環境で、ロボットを使ってイチゴを収穫する遠隔操作を実施し、問題なく収穫できることを確認しました(図6)。
また本システムに、モニタの表示情報とロボットアームの速度をエンド・ツー・エンドの通信品質に応じて変更する機能を実装し、本機能がイチゴの収穫作業の操作性をどの程度向上させたのかを検証しました。具体的にはイチゴの位置にロボットアームを1回の操作で正確に移動できた割合(成功率)を測定しました。その結果、通信品質が変動する環境では成功率が約50%でしたが、本機能を活用することで成功率は約80%に向上し、約30%の改善が確認されました。さらに、被験者5名全員が本機能による操作性の改善を実感したと評価しました。これらにより、遠隔でイチゴの収穫を行うことで効率性・生産性が向上することが期待されます。

まとめと今後の展望
本稿では、ネットワークコンピュート高速クローズドループ制御技術と、通信技術を核としたスマート農業の取り組みを紹介しました。実証では、NTTアグリテクノロジーの「遠隔営農支援プロジェクト」とNTTアクセスサービスシステム研究所の技術が組み合わさることで、新しい農業のあり方を示すことができました。「収穫」という農作業の中でも複雑な判断と動作が実現されたことで、ロボット導入により、現場にいない作業者でも十分に収穫作業を行うことが可能であること、遠隔操作のアプローチが可能であることが実証されました。
農業においては、担い手不足の問題や食の安定供給の課題がますます拡大し、通信技術等による労働の省力化・効率化のニーズは今後ますます高まっていくものと想定されます。今後は、「遠隔営農支援プロジェクト」のさらなる推進の中で、AIやロボットを含む先端的技術のユースケース拡大、社会実装を進めていきます。
中でも、さまざまな状況を把握・判断したうえで細かい動作が求められるロボットについて、今回、通信品質に合わせたロボットの遠隔操作が実現可能になった領域においては、通信・ロボットの両側面でさらなる技術の検討を行うとともに、対象となる顧客層の検討やビジネスモデルの策定等、社会実装に向けた活動を進めていきます。
「収穫」をはじめとするロボットは、現場を往訪する時間的負荷を軽減する効率的な農業経営に資するソリューションであると同時に、酷暑・厳寒環境下で栽培従事者にかかる身体的負荷をも軽減し、農業の参入障壁を下げ、計算してつくる農業・儲かる農業に有効な手立てになり得ると考えています。
遠隔営農支援の取り組みを進めていく中では、栽培にかかる高度な判断を行う「専門家」側のAI化と、実際に栽培の作業を行う新規就農者等の「栽培従事者」側のロボット化をそれぞれ進めていくことになりますが、これらの技術要素はNTTグループが持つ技術がそれらの課題を前に進めるうえで極めて有効であることも明らかになりました。今後も、NTTグループが持つ通信・AI等の幅広い先端的知見を、農業をはじめとするさまざまな分野に実装していくことで、技術的優位性・模倣困難性を獲得しながら、持続的な社会の形成に貢献することをめざしていきます。
■参考文献
(1) https://www.maff.go.jp/j/study/attach/pdf/nouti_housei-1.pdf
(2) https://journal.ntt.co.jp/article/23110

(上段左から)秦野 智也/黄 掣/梅田 果凜
(下段左から)小林 弘高/伊藤 圭/緒方 勇理







日本の食の安定供給に寄与するため、引き続き遠隔営農支援に取り組みスマート農業を推進します。また、光アクセスシステムの安定性向上に向け研究開発を進め、事業化に貢献します。