2025年7月号
特集1
遠隔診療の実現に向けた身体遠隔化技術
- 遠隔診療
- 遠隔視診
- 遠隔触診
本稿では、人の主観的な感覚に立脚し、身体的な能力・技能を遠隔でも発揮可能とする「身体遠隔化技術」を、医療サービスの提供が困難な地方や医療過疎地域に適用する取り組みを紹介します。具体的には、医師や看護師などの医療従事者が遠隔地から患者に対して視診や触診を実施できる新しい形態の提案や、その実現に向けた要素技術である動作指示技術や触感取得技術、触感再現技術について述べます。
後藤 充裕(ごとう みつひろ)/内田 聡一郎(うちだ そういちろう)
今井 良太(いまい りょうた)/海老名 光希(えびな こうき)
NTT人間情報研究所
遠隔診療実現の必要性
超高齢化社会の進行に伴い、医療ニーズが急速に増加する一方で、医師だけでなく看護職やリハビリ専門職などを含む医療従事者の不足が深刻化しています。この人材不足は、医療サービスを提供する医療リソースの地域的偏在をさらに顕著にし、いわゆる「医療へき地」の拡大を招いています。その結果、必要な医療サービスへのアクセスが困難となる患者が増えつつあり、地域間における医療格差の是正が喫緊の課題となっています(1)。
このような状況を踏まえ、限られた医療リソースを有効活用しながら、患者の居住地に依存しない医療サービス提供体制を構築することが求められています。こうした体制の構築に向けて、ICTやロボティクスの活用により、患者が自宅にいながらでもビデオ通話などを介して医療従事者による診療を受けられる「遠隔診療」を試行する動きも生まれつつあります。この遠隔診療の実現に向けては、患者身体から取得できるバイタルデータを確認するだけではなく、対面では医療従事者が意識せずに行ってきた患者の腕や脚を自らの手で優しく動かしながら、視認しにくい部位(例えば腕の裏側や関節部位など)を確認することや、患者身体の皮膚の硬さ・温度感の変化などを観察するといった身体性を伴う能力・技能を、遠隔においても発揮することが必要になります。
NTT人間情報研究所では、こうした遠隔診療のベースとなる視診や触診の遠隔化の実現に向けて、医療従事者による身体性を発揮しながら患者への適切な診療を遠隔からも実施可能とする「身体遠隔化技術」の研究開発に取り組んでいます。
身体遠隔化と遠隔診療(視診・触診)への適用
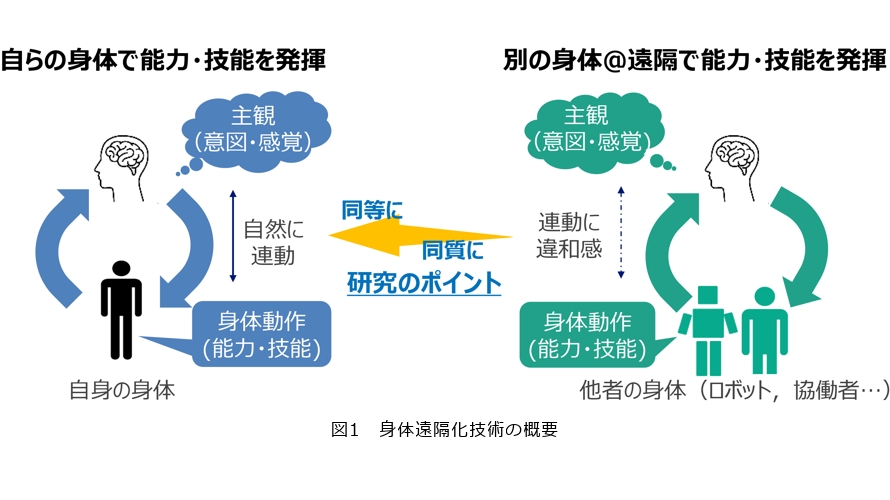
私たちが研究開発を進めている「身体遠隔化」では、自身の身体により発揮していた身体性を伴う能力・技能を、地理的な制約を越えて別の身体(ロボットや協働者)を用いても発揮可能とすることをめざしています。これにより、熟練技能者の能力の遠隔地における再現や、身体的制約のある者が他者の身体を介して能動的に環境とかかわることが可能になります。
この「身体遠隔化」は、単に自身の身体と遠隔地の別の身体との間で高精度・高解像度な情報伝達を実現するだけでは不十分です。重要なのは、自身の身体と同様に、自らの主観(意図)が身体動作の起点となり能力や技能を発揮し、その結果として得られる主観(感覚)を本人に還元するという主観-身体動作の連動を成立させることにあります。この連動が違和感なく成立してはじめて、ユーザは遠隔にある別の身体を「自分の身体のように」扱い、複雑かつ高度な身体的な能力・技能を発揮することが可能になります(図1)。
そして、私たちはこうした「身体遠隔化」の技術を、視診や触診といった診療行為の遠隔化へ適用する際の課題探求を行い、医療従事者が患者に対面しなくとも視診や触診を実施可能とする要素技術や、それらに基づいた遠隔化形態の検討を進めてきました。視診は、患者の身体的所見を視覚的に把握する診療行為であり、特に皮膚の色調・腫れ・発赤などの観察を通じて、異常の有無を判断するための基本的かつ重要な手段です。この遠隔化に向けては、医療従事者が自身の視線・注視点・構図などへの意図を遠隔地に伝達し、能動的な観察を成立させることが求められます。これは、遠隔地のカメラ映像の構図を意図どおりに調整し、かつ医療従事者が見たい部位の提示を自律的に誘導して視認できるような「視線の身体性」を伴う能力の発揮であるといえます。
触診は、身体の表面や内部の状態を医療従事者が自らの手指で触れることによって、腫れ、硬さ、温度などを評価する診療行為であり、接触を通じた感覚の取得という「手指の身体性」の発揮が求められます。この遠隔化に向けては、医療従事者の「触れる」という意図に基づいて、遠隔地で手指の能力を正確に発揮するとともに、遠隔地で取得した触感情報を、医療従事者に対して、再現性高くフィードバックすることが必要となります。
このように、視診と触診はどちらも医療従事者が持つ身体的能力と密接に結びついており、単なる情報伝達ではこれらの再現が困難です。そこで、私たちは、視診の遠隔化に向けて、医療従事者が患者とのビデオ通話中のカメラ映像に対して、任意の身体部位を適切な構図・大きさ・角度で映せるよう効率的に指示できる「提示動作指示技術」を考案しました。また、触診の遠隔化においては、医療従事者が患者の側にいる看護師や家族などの協働者と協調して患者身体への触診を実施する「触診動作指示技術」「触感取得技術」「触感再現技術」の検証を進めています。以降では、これら取り組みについて詳述します。
遠隔視診のための提示動作指示技術
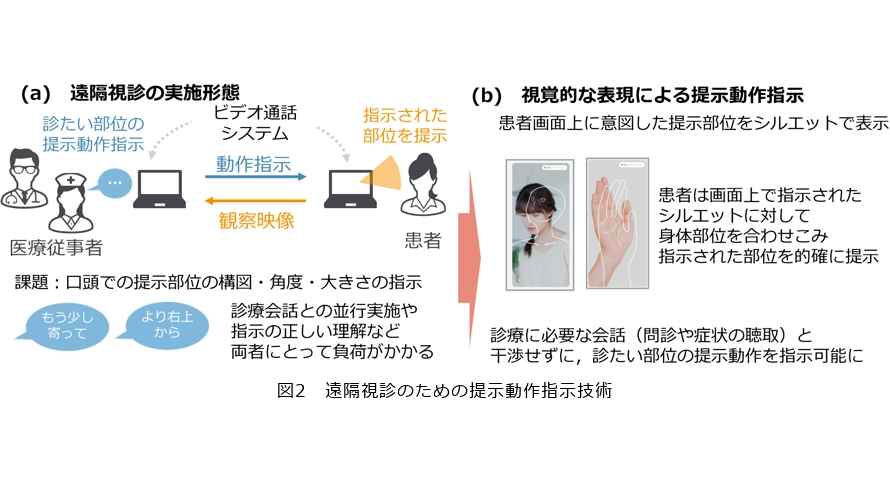
現在、遠隔視診は主にビデオ通話を介して実施されており、医療従事者が問診や症状の聴取など診療に必要な会話を口頭で行いながら、必要に応じて症状の出ている身体部位の所見を画面越しに確認することが一般的です。この際に、身体部位が視診に適した構図・大きさ・角度で画面に映し出されるかは、患者自身のカメラ操作や身体部位の提示動作に依存しているのが現状です(図2(a))。こうした環境においては、医療従事者は診たい部位を的確に画面に収めるために、構図・大きさ・角度などに関する自身の意図を口頭で患者に伝え、患者はその指示に従って身体部位をカメラへ提示することになります。しかしながら、こうした言葉による身体部位の提示動作指示は、両者にとって煩雑なやり取りになりがちで負荷が高くなります。医療従事者にとっては、意図した構図を細かなニュアンスまで言語化しながら、診療に必要な会話と並行して、指示を出す必要があり認知的負荷が大きくなります。一方、患者にとっても、指示された内容を正確に理解し、求められるかたちでカメラに身体部位を提示することは容易ではありません。
そこで、従来口頭で伝達される動作指示に代えて、医療従事者が意図した構図・大きさ・角度を患者が見ているビデオ通話画面上に視覚的に表現することで、両者の負荷を軽減する提示動作指示を実現します。具体的には、最終的に患者に映してほしい身体部位の構図・大きさ・角度を表現したシルエットを患者画面上に表示し、患者はそのシルエットに自身の身体部位を合わせるように身体を動かすだけで、指示された身体部位を的確に映せるようになります(図2(b))。加えて、このシルエットは、PCやタブレットのようにカメラの位置が固定される機器に限らず、スマートフォンのように柔軟に調節できる携帯機器においても提示可能です。スマートフォンを用いることで、患者自身がカメラの位置や角度を手に持って調整することができ、視診に適した構図の提示がさらに容易になります。特に、足先や太ももといった身体の下部を映す場合に、固定された機器ではカメラアングルの制約から困難になることがありますが、取り回しの良い携帯機器であれば、こうした部位に対しても柔軟にカメラを向けることができ、医療従事者が意図する構図に沿った身体部位の提示を実現しやすくなります。
また、こうしたシルエット表現が身体部位の提示動作指示に有効であるかを確認するために、遠隔視診と同様に、患者の身体所見をビデオ通話を介して確認するテレナーシング(遠隔看護)に従事する看護師を対象にケーススタディを実施してきました(2)。ケーススタディの結果、動作指示を出す看護師の立場では、従来の口頭だけの指示と比較して、提案するシルエットによる指示は、動作指示自体の作業負荷の低減、指示を伴うやり取りの主観的な満足度や明瞭さを高める傾向が確認されました。しかしながら、動作指示を受ける患者の立場では、指示を伴うやり取りの主観的な評価は高まった一方で、作業負荷が高くなるケースも散見されました。今後は、ケーススタディ規模の拡大や患者の立場における負荷軽減をめざしたシルエット表現の改良などを検討していきます。
遠隔触診のための動作指示、触感取得・再現技術
触診は、身体の表面や内部の状態を、触れることで評価する医学的手技であり、腫れや硬さ、温度の変化などを確認するために行われます。この触診の遠隔化に向けては、患者身体に触れた際の触感を遠隔地へ正確に伝達する仕組みの確立が必要になります。また、触診では患者が医療従事者に直接触れられることで、心理的な安心感が醸成され、診療に対する不安や緊張を和らげる効果があるといわれています。その結果、医療従事者と患者間での信頼関係の形成が促進されるという観点もあり、患者が他者に直接触れられている体験を維持したまま、遠隔化することも重要です。しかしながら、従来の遠隔触診の取り組みでは、遠隔操作可能なロボットを医師が操作して、患者身体の触感自体の伝達に焦点を当てたものが多く、患者が他者に触れられている体験の維持を考慮した取り組みは、あまり行われていません。
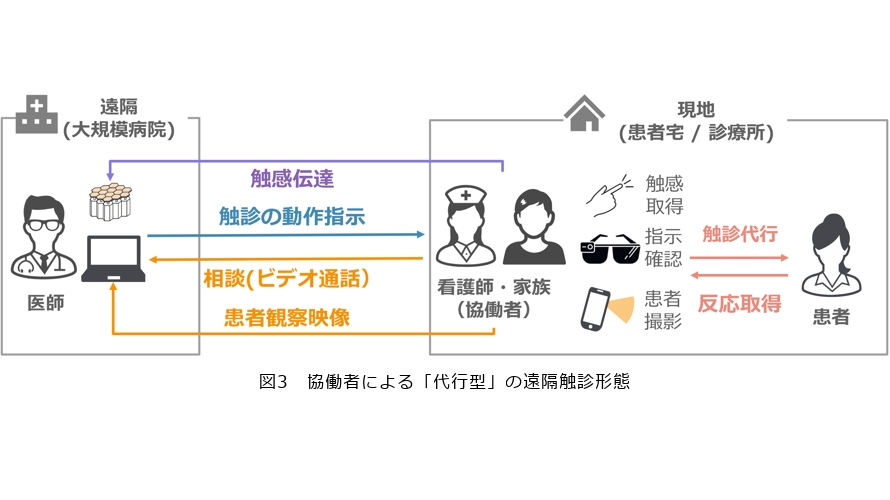
そこで、私たちは、遠隔にいる医師と患者の近くにいる協働者が連携し、医師に代わって触診実施する「代行型」の遠隔触診形態を検討しています(図3)。この形態では、協働者が、指先の覆われていない指圧力取得センサやAR(Augmented Reality)グラス、スマートフォン(カメラ)などを身につけ、医師からどのように患者身体に触れるべきかの指示を受けながら、患者身体に触れた際の触感データを取得します。そして、その触感を遠隔にいる医師に伝達することで、まるで医師が患者に直接触っているような体験を維持したまま触診を遠隔化します。また、このような協働者が代行する形態は、早期の現場導入の観点からも有用であると考えています。従来の遠隔触診の取り組みでは、現地側に遠隔操作ロボットなどの装置を設置する必要があり、導入できる環境が限定されます。一方で、私たちの提案する形態では、協働者が装着するデバイスが、比較的簡易なウェアラブルデバイスにより構成されており、現地側への特別な装置の設置を必要としません。そのため、限られたスペースや医療リソースでも導入しやすく、現場での早期運用が期待できる点が大きな利点となります。
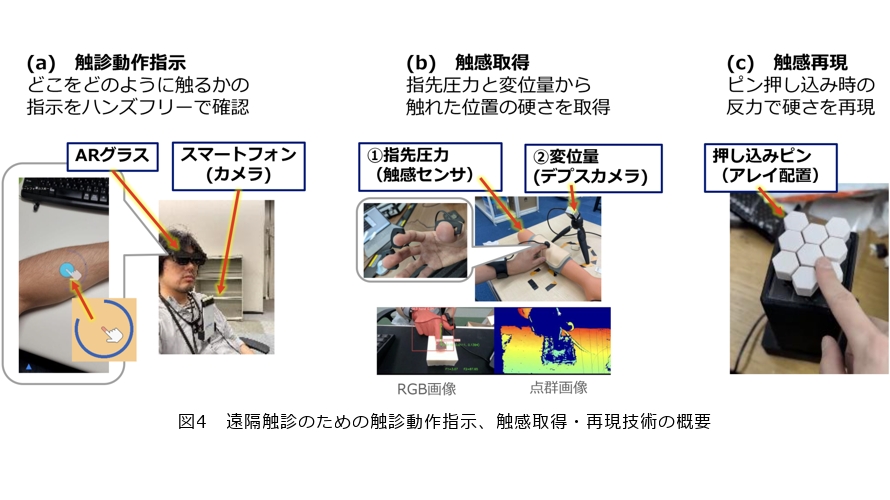
このような「代行型」の遠隔触診を実現する要素技術として「触診動作指示技術」「触感取得技術」「触感再現技術」についてそれぞれ紹介します。触診動作指示技術は、図4(a)に示すように、遠隔の医師が協働者に対して、患者のどの身体部位を、どのような強さ・時間長で触れるべきかを指示するために、患者部位を撮影したカメラ映像に対して、視覚的なアイコンを重畳表示するものです。協働者は、重畳表示された視覚的なアイコンをARグラス越しに確認し、触れるべき位置や触れる際の強さ・時間長を把握することができます(3)。遠隔視診の提示動作指示でも述べたとおり、視覚的な表現を用いることで、医師が意図した触診すべき位置やその動作を、単なる口頭伝達よりも正確に伝えることが期待できます。現在は、医師がプリセットされたアイコンから1つを選択することで協働者への指示を決定していますが、今後は、より柔軟な指示を実現するための提示指示インタフェースの検討を進めていきます。
触感取得技術とは、協働者が触診を代行する際に、患者の身体部位に触れたときの硬さを取得するための技術です。今回、図4(b)に示すように患者が他者に触れられている体験を維持するために、指先が覆われていない指圧力取得センサを用いています。そのため、触れた部位の硬さを求めるにあたっては、協働者の指先と患者の身体部位という2つの弾性体の接触を考慮して、触れた身体部位のヤング率を算出する必要があります。この算出に際しては、センサを用いて協働者の指先にかかる圧力を取得するとともに、デプスカメラを用いてセンサを取り付けた指先の変位量を取得し、ヘルツ接触理論(Hertzian contact theory)に基づいて、身体部位の硬さを求めています(4)。また、身体部位の直接的な硬さを求めるだけではなく、協働者が患者の身体部位を触れることで、その症例の進行度段階を機械学習を用いて推定する検討も進めています。
触感再現技術とは、協働者が代行して取得した患者身体部位の硬さ情報を、遠隔にいる医師が触覚として確認できるように、物理的に再現するための技術です。図4(c)に示すように、六角形の押し込み型ピンをアレイ状に配置した構造の触感再現デバイスにより、局所的な硬さの違いを空間的に表現します。本デバイスは協働者が触診代行時に取得した指先圧力および変位情報に基づいて、各ピンの押し込み量を制御することで、医師が遠隔にいても、あたかも自らが患者の身体に触れているかのような触感を得ることが可能となります。
現在は各技術共に、初期評価を行っている段階ですが、今後は、多くの疾患が関与する下肢浮腫を具体的な対象と定めて、実際の医療従事者と連携しながら、それぞれの有効性を検証し、対面で実施する触診との差異を明らかにします。
今後の展望
本研究では、医療リソースの地域的偏在や医療従事者の不足といった課題に対応するため、視診および触診の遠隔化を可能とする身体遠隔化技術の構築をめざし、遠隔視診における提示動作指示技術、ならびに遠隔触診における触診動作指示技術・触感取得技術・触感再現技術といった要素技術の研究開発と検証に取り組んできました。
今後は、各要素技術について、実際の医療従事者との連携のもとで、対面での診療との比較を通じて、フィージビリティ評価を実施していきます。これにより、本技術の有効性と限界を明らかにし、将来的な遠隔診療の質的向上と社会実装に向けた知見を蓄積していきます。
■参考文献
(1) https://www.mhlw.go.jp/stf/seisakunitsuite/bunya/hukushi_kaigo/kaigo_koureisha/chiiki-houkatsu/index.html
(2) 内田・今井・後藤・瀬下・亀井:“テレナーシング時の療養者アセスメントを支援する身体動作の視覚的ナビゲーション手法とその評価,”第28回日本遠隔医療学会学術集会抄録集,2024.
(3) 今井・後藤・瀬下:“遠隔触診におけるウェアラブルカメラとARマーカーを活用した動作指示方式の検討,”信学技報, Vol. 124, No. 337, MVE 2024-29, pp. 24-29, 2025.
(4) K. Ebina, M. Goto, and H. Seshimo: “Development of a simple softness measurement method using a wearable force sensor and depth camera for remote edema palpation,” Proc. of EMBC 2025, Copenhagen, Denmark, July 2025.
(上段左から)後藤 充裕/内田 聡一郎
(下段左から)今井 良太/海老名 光希






患者の居住地に依存せずに、どこからでも医療サービスを享受できる社会の実現に向け、視診・触診の遠隔化を起点とし、さまざまな診療の遠隔化について研究開発に取り組んでいきます。