2024年3月号
特集1
オンチップ生体モデルの構築に向けたハイドロゲル運動素子の創製
- オンチップ生体モデル
- ハイドロゲル
- ソフトアクチュエータ
臓器のような高次機能を培養細胞で発現・維持するためには、細胞を育てる環境をいかに生体内に近づけるかが重要です。NTT物性科学基礎研究所では、生体に類似した性質を示す材料であるハイドロゲルを、生体器官を模した薄膜・管状構造へとチップ上で形状制御する技術を確立しました。本稿ではさらに、光刺激で大きく・素早く・任意領域を動かせる運動素子へと展開し、生体器官さながらに運動制御する技術について紹介します。
高橋 陸(たかはし りく)
NTT物性科学基礎研究所
チップ上における生体内環境の再現
近年、化粧品・医薬品・農薬などの開発における動物実験の代替法として、培養細胞を用いたアッセイプラットフォーム*1が注目されています。ヒト細胞を用いることで動物倫理の問題のクリアはもちろん、種差による応答の違いを考慮する必要がない魅力的なツールとして期待されています。一方で、生体を使わずに適切な評価を行うためには、従来の培養方法では実現できなかったin vivo(生体内)機能を再現する必要があります。そこで、より生体内の環境に近い状態を人工的に再現し、培養細胞による高度な臓器機能を発現・維持させる臓器チップ(Organ-on-a-chip:Ooc)技術をはじめとした、生体模倣システム(Microphysiological System:MPS)が盛んに研究されてきました(1)。こうした技術を基に、センサ基板上で臓器機能を再現した「オンチップ生体モデル」を構築できれば、細胞レベルの解像度で各種臓器のさまざまな情報を精細なデータとして取得できることが期待されます。加えて、iPS細胞*2などを活用することで、人種の差異や個人のゲノム多様性*3を反映した生体データを、分子・組織・臓器レベルごとに取得・解析可能な技術として限りない可能性を秘めています。このオンチップ生体モデルの実現に向けて、細胞を培養する環境をいかに生体内に近づけられるかが課題であり、「生体に優しい材料」・「生体に近い形状」・「生体内の刺激環境」を同時に実現できる技術が求められてきました。
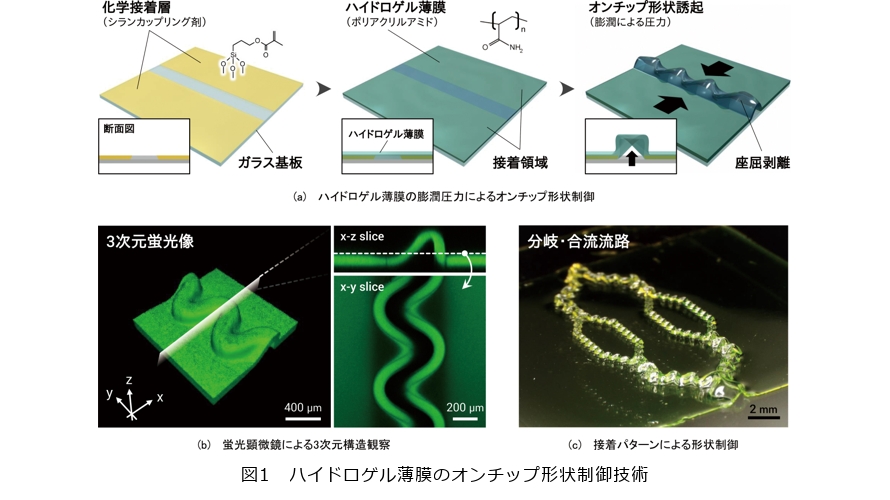
そこでNTT物性科学基礎研究所(物性研)では、高い生体適合性を示す材料である「ハイドロゲル」に着目し、生体を模した3次元形状へと制御する技術を研究してきました。ハイドロゲルは、高分子のネットワークに大量の水が閉じ込められたゼリー状の材料であり、身の回りではコンタクトレンズやおむつなどに使われています。私たちの体の中も生体由来の高分子やタンパク質によるネットワーク構造が存在し、水を保持しています。すなわち、私たちの体もまたハイドロゲルであり、細胞を育てる足場としてもっとも適した材料の1つであると考えられています。一方で、ネットワーク中の水分量に応じて体積が変化してしまう、材料の構成成分のほとんどが水であるため非常に柔らかくもろい、といった特性があり、基板上で3次元的に形状を制御することが課題でした。そこで私たちはこれまでに、ハイドロゲルが水を吸って膨らむ力を逆に利用し、血管や腸管といった生体器官*4のように薄膜かつ中空な管状形状へと自立成形させるオンチップ形状制御技術を報告しています(2)。具体的な技術の概要を図1に示します。図1(a)に示す作製スキームに従って、まずガラス基板の表面をハイドロゲルと化学的な接着が可能なシランカップリング剤で処理し、一般的なリソグラフィ技術*5を利用して処理・未処理のパターンを形成します(例では矩形パターンを図示)。次に、ハイドロゲル薄膜を基板上で合成することで、ガラス基板とパターン上に接着されたハイドロゲル薄膜が得られます。その後、ハイドロゲルを水にさらすことで吸水し、膨潤による圧力が発生します。その結果、非接着部位では周囲からの圧力を解放するために浮き上がる物理現象、「座屈剥離*6」が生じ、ハイドロゲル薄膜とガラス基板から成る薄膜・管状構造が形成されます。その立体構造を蛍光で観察した結果を図1(b)に示します。得られる構造は、ハイドロゲルの硬さ・厚み・水分量や非接着部位の幾何パターンなどの物理的なパラメータで制御できることが分かっており(3)、生体内におけるひだ・しわといった滑らかな立体構造の再現が可能です。加えて、特徴的な流路状の構造は、接着パターンを制御することで自由に設計することができ、血管網を模した分岐・合流流路などを作製することが可能です(図1(c))。
*1 アッセイプラットフォーム:創薬研究において、化合物の評価を多面的に行うことが可能な原理・手法のこと。
*2 iPS細胞:人の体細胞に、特定の遺伝子を導入することでつくられる、あらゆる種類の細胞に変化する潜在的な能力とほぼ無限に増える能力を持った細胞のこと。
*3 ゲノム多様性:DNAの文字列に表された遺伝情報のすべてであるゲノムには、個人間で0.1%程度配列が異なり、多様性をもたらしています。
*4 生体器官:多細胞生物の体を構成する単位を指し、協同して一定の機能を営んでいる組織の集合体のことで、臓器とも呼ばれます。
*5 リソグラフィ技術:感光性の物質を塗布し、露光、現像工程によりパターンを形成する技術。半導体集積回路をはじめとするさまざまな製品製造に使用されています。
*6 座屈剥離:薄膜を両端から圧縮することで、中央部が湾曲しながら浮き上がり、アーチ状の構造へと変形します。これが、折れ曲がりながら(座屈)剥がれる(剥離)という座屈剥離現象。
大変形と高速応答を両立したハイドロゲル運動素子
これまでの紹介した技術により、「生体に優しい材料」で「生体に近い形状」をチップ上に作製できるようになりました。一方で、生体内における動的な刺激環境を再現するためには、ハイドロゲル薄膜の形状を「動かせる」技術が必要になります。簡単な方法としては、ハイドロゲル薄膜で作製された流路構造を外部ポンプと接続し、流圧を制御する手法が考えられます。非常に柔らかい本流路構造は、圧力に応答して大きく変形させることが可能であり、血管が脈動するような収縮運動を再現することが可能です(4)。一方で、本手法では構造全体が一様に変形してしまう、外部機器との接続が必須といった課題もあり、より生体器官に近い複雑な動きを簡便に再現できる新たな手法が求められてきました。
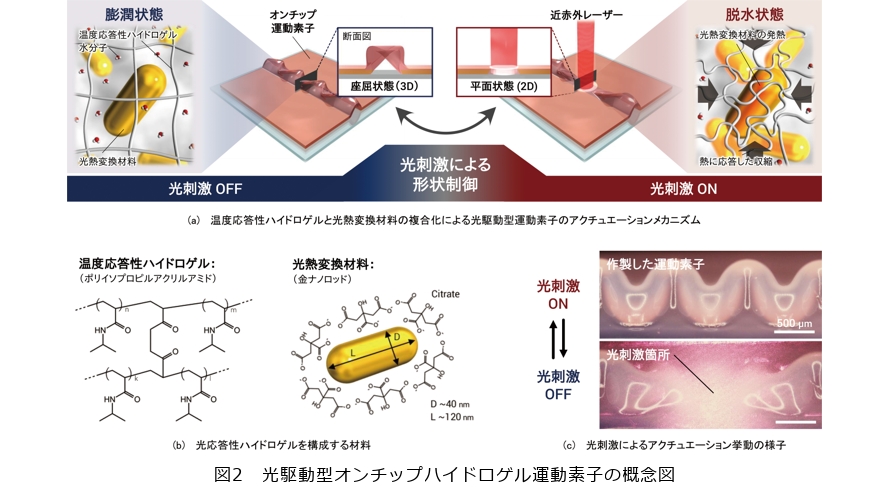
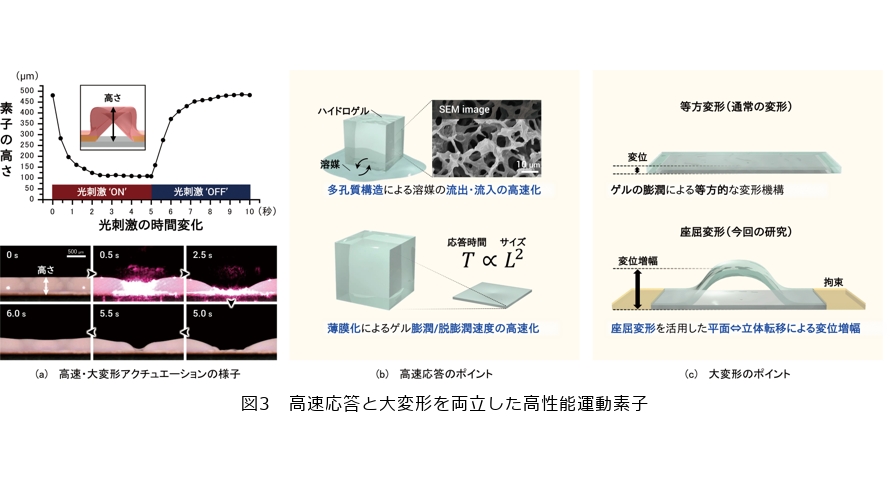
そこで私たちは、「光刺激で変形できる」ハイドロゲル薄膜を設計・作製し、オンチップ形状制御技術を適応させた光駆動型の運動素子*7を提案・作製しました(5)。その概要を図2に示します。今回作製した素子は、温度に応答して水を吐き出し収縮する温度応答性ハイドロゲルと、光照射で発熱する光熱変換材料を組み合わせることで、光刺激のON/OFFで膨潤状態と脱水状態を切り替えることが可能です(図2(a))。温度応答性のハイドロゲルとしては細胞培養の基材としても使用されているポリイソプロポリアクリルアミドゲル*8を、光熱変換材料としては、近赤外光の照射で効率的に発熱する金ナノロッド*9を使用しています(図2(b))。そのため、チップ上におけるハイドロゲル薄膜の座屈構造に近赤外レーザ照射することで、局所的な座屈状態と平面状態の形状制御が可能です。実際のサンプルのアクチュエーション挙動の様子を図2(c)に示します。画像中心部にある座屈状態の立体管状構造に近赤外レーザを照射したところ、完全に管がつぶれた平面状態へとすぐに変形し、光刺激をやめることでまた元の座屈状態まで急速に復元する様子が観察されました。本変形挙動をより詳細に調べるため、運動素子を真横から観察可能な実験系を用意し、光刺激中の運動素子の高さ変化を経時的にプロットしたものを図3(a)に示します。驚くべきことに、光刺激開始後2秒以内に平面状態へと移行し、光刺激停止後2秒程度で座屈形状まで復元することが分かりました。加えて、運動素子のアクチュエーション変形率(最大・最小高さから見積もった変形量の割合)は約360%に達することも確認されました。この高速応答・大変形アクチュエーションは、これまでの光駆動型ハイドロゲル運動素子と比べても非常に高い性能であることが分かっています。
高性能化のポイントについて、高速応答と大変形の観点からそれぞれまとめました。まず高速応答を可能にした構造のポイントを、図3(b)に示します。通常のハイドロゲルは数10nmの孔が開いたネットワーク構造をしており、この穴を抜けて水分子が移動します。今回用いたハイドロゲルは特殊な作製法により、数10μmのつながった孔が開いています(多孔質構造)。すなわち、1000倍近く大きな孔の開いた構造をしているため、スポンジのように水の出入りが容易となり、溶媒の移動に伴う体積変化の応答が素早くなったと考えられます。また、この応答時間はハイドロゲルのサイズの2乗に比例して長くなることが知られています。今回、100μm程度のハイドロゲル薄膜を運動素子としたことで、厚みのあるハイドロゲルと比べてより短い時間で膨潤・脱膨潤が可能になりました。
次に大変形を可能にした変形のポイントを、図3(c)に示します。通常、ハイドロゲルが水を吸って膨らむ、あるいは水を吐き出して縮む場合、すべて方向が同じ割合で変化する等方変形になります。今回、ハイドロゲルの一部を基板に固定(拘束)した状態で膨らませるオンチップ形状制御技術を適応させたため、変形が許容される膜厚方向への座屈による立体変形が生じました。本変形は膜厚方向でみると大きく立ち上がることとなり、変位増幅機構として機能しています。これにより、通常の膨潤変形による1方向当りの変形率と比べて、約10倍大きく変位できることが確認できており、大変形が可能になったと考えています。
その他、本運動素子は空気中において安定的に動作できる特徴があります。本来、ハイドロゲルの膨潤・脱膨潤を利用した運動素子は、水のある環境でのみ動作が可能であり、空気中での長期使用が難しいという課題がありました。管構造を備えた本運動素子は、管内に水を保持することができるため、空気中においても乾燥することなく安定動作が可能です。また、ゲルの硬さや素子の高さを変化させることで、運動性能を細かくチューニングできることも分かっています。そのため、さまざまな環境で動作可能なオンチップ型運動素子として、マイクロフルイディクス*10やソフトロボティクス*11といった幅広い分野における応用も期待できます。
*7 運動素子:アクチュエータとも呼ばれ、何らかのエネルギーを動作に変換する装置のこと。
*8 ポリイソプロピルアクリルアミド:温度に応答して、保持した水を吐き出しながら収縮可能なハイドロゲル。生体適合性があり、細胞培養基材としても利用されています。
*9 金ナノロッド:球を伸長させたカプセルのような形をした金由来のナノ材料。適切な波長の光を照射することで、光エネルギーを熱へと変化し、発熱する(光熱変換材料)。ロッドの長さを調節することで、光の吸収ピークを550~1400nm程度まで制御することができます。
*10 マイクロフルイディクス:μm程度のサイズ幅の流路を流れる流体に関して、流体挙動が従来のスケールとは異なる流体システムを扱う研究分野のこと。
*11 ソフトロボティクス:ロボット工学のうち、柔軟性のある素材を用いた、動きに繊細さやしなやかさを持たせたロボットを扱う研究分野のこと。
生体模倣アクチュエーションの実現
本運動素子は高い性能だけでなく、挙動制御の面においても優れています。刺激源が光であるため、遠隔からねらった位置への照射が可能であり、運動素子自体に配線など外部機器を接続する必要がありません。また、今回用いた材料の組合せは、35℃以上に加熱されることで急速に収縮します。光熱変換材料である金ナノロッドの含有量を調整することで、光刺激時に35℃程度まで迅速に加熱できる設計にしており、過剰に加熱されることがありません。そのため、光刺激時には照射部位のみ変形が生じ、周辺部位への熱拡散による影響を抑えることができています。以上のように本運動素子は、光刺激による正確な変形の位置制御と局所制御が可能であり、生体器官を模した複雑な挙動の制御も実現できています。
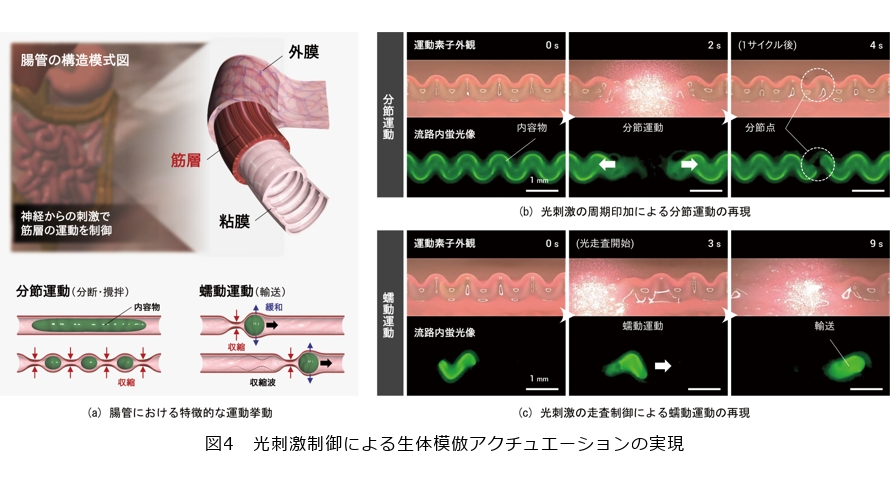
一例として、私たちは腸管の特徴的な運動に着目しました。図4(a)にその概要を示します。腸管は3層構造をしており、臓器間の摩擦から保護するための外層、特徴的な運動を起こすための筋層、消化と吸収を担う粘膜から構成されています。この中の筋層の収縮運動を、神経からの刺激で巧みに制御することで、特徴的な2つの運動をコントロールしています。具体的には、特定のポイントにおいて収縮と緩和のサイクル運動が繰り返されることで、腸内容物の分断や攪拌を担う分節運動が発生します。また、収縮と緩和の隣り合うポイントが連続した波(収縮波)として伝搬することで、ホイップクリームを絞り出すかのように腸内容物を輸送する蠕動運動が発生します。
私たちはこの2種類の運動を、光刺激を時間的・空間的に制御することで再現することを試みました(図4(b))。まず、運動素子の内部に、腸内容物を模した粘性の高いオイル(ミネラルオイル)を注入しました。このオイルは緑色の蛍光物質で着色してあるため、蛍光顕微鏡で内容物の状態を観察することができます。その後運動素子の特定のポイントにおいて、2秒周期で照射を繰り返し、座屈状態と平面状態のスイッチング、すなわち管構造を開閉運動させました。その結果、連続していた内容物が押しつぶされ、確かに分断できる様子が確認できました。これは管構造を完全に閉じることができるためであり、中空構造・大変形が可能な本運動素子の特徴を活かして分節運動の再現が可能であることを示しました。
次に、運動素子の内部に、上述した腸内容物モデルを少量の塊として注入しました。そして塊の少し後ろの点を光刺激して管構造をつぶし、ゆっくりと照射点をスライド(走査)させました。その結果、つぶれた管が移動していく収縮波を再現することができ、それに伴って内容物が移動していく様子が確認できました。これは管構造を閉じられる大変形はもちろん、変形の位置制御・局所制御が可能であるためであり、蠕動運動の再現も可能であることを示しました。
このように、運動素子を生体器官における筋層、光刺激制御を生体における神経制御として、生体器官の複雑な動作を再現できることが分かりました。加えて、本運動素子で再現した運動の性能は、同じサイズスケール生体器官であるラットの腸管に匹敵するものであることが確認できています。
今後の展開
本稿では、オンチップ生体モデルの作製に向けた基盤技術として、「生体に優しい材料」を、「生体に近い形状」へと制御し、「生体内の刺激環境」を再現する運動素子について紹介しました。細胞内外における物理的な刺激(メカニカルストレス)は、細胞の成長・分化・増殖・形態形成などさまざまな機能調節に関与していることが明らかになってきました。そのため、生体器官の複雑かつ動的な機械刺激をチップ上で再現可能な本技術は、生体内に近い環境を提供することを可能とし、細胞培養と合わせることでより洗練された生体モデルを提供できることが期待されます。今回の運動素子は35℃、空気中で効率的に駆動する設計であり、細胞の培養に適した環境(37℃、培養液中)での駆動条件とは異なっていますが、材料組成を調整することで動作温度を細かく調整可能なことを確認しています。今後はメカニカルストレスによる影響を調べたい培養細胞を適切に検討し、実際に刺激を印可しながら培養できる実験系の構築をめざします。
また、生体データの取得を目的とした、バイオセンサとの統合も今後の課題です。本運動素子は生体内環境を模倣可能なハイドロゲル薄膜部と、ガラス基板などの固体からなる支持基板部の、ヘテロ(異なる2種の)構造をとっています。さまざまな材料種を選択可能な支持基板部は、ハイドロゲル薄膜部と異なり加工難度も低いため、NTT研究所の得意とする半導体加工技術を活用したセンサを作製・統合できると考えています。
こうした技術が成熟し、個々人のさまざまな臓器機能を高性能なバイオセンサ基板上で再現することができれば、パーソナライズ化された生体データを高精度・多角的に取得することができ、自身をデジタル空間で再現したモデルである「バイオデジタルツイン*12」の構築につながることが期待されます。特に、実際の生体では試すことが難しい条件(極限環境や薬剤投与など)におけるデータが取得できるため、モデルの補完にも貢献できると考えています。このようなオンチップ生体モデルの実現をめざして、今後も基盤技術を積み重ねていきます。
*12 バイオデジタルツイン:サイバー空間における、人それぞれの身体および心理の精緻な写像をバイオデジタルツイン(Bio Digital Twin:BDT)と呼び、NTT医療健康ビジョンの根幹を支える技術。
■参考文献
(1) D. E. Ingber:“Reverse Engineering Human Pathophysiology with Organ-on-Chips,”Cell, Vol. 164, No. 6, pp.1105-1109, 2016.
(2) 高橋・田中・山口・小池:“医療健康の未来を拓くバイオニクス技術,”NTT技術ジャーナル, Vol. 33, No. 5, pp.32-36, 2021.
(3) R. Takahashi, H. Miyazako, A. Tanaka,and Y. Ueno:“Dynamic Creation of 3D Hydrogel Architectures via Selective Swelling Programmed by Interfacial Bonding,”ACS Appl. Mater. Inter-faces,Vol. 11, No. 31, pp. 28267-28277, 2019.
(4) R. Takahashi, H. Miyazako, A. Tanaka, Y. Ueno, and M. Yamaguchi:“Tough, Permeable and Biocompatible Micro-fluidic Devices formed through the Buckling Delamination of Soft Hydrogel Films,”Lab on a Chip,Vol. 21, No. 7, pp.1307-1317, 2021.
(5) R. Takahashi, A. Tanaka, and M. Yamaguchi:“Biomorphic Actuation Driven via On-Chip Buckling of Photo-responsive Hydrogel Films,”Advanced Functional Materials, Vol. 33, No. 24, p.2300184, 2023.
高橋 陸





刺激応答性ハイドロゲルを用いたオンチッププラットフォームは、生体器官に類似した性質・形状・動きを再現できる魅力的な技術です。生体モデルとしてはもちろん、高性能・高機能な運動素子として、新奇応用にも取り組んでいきます。